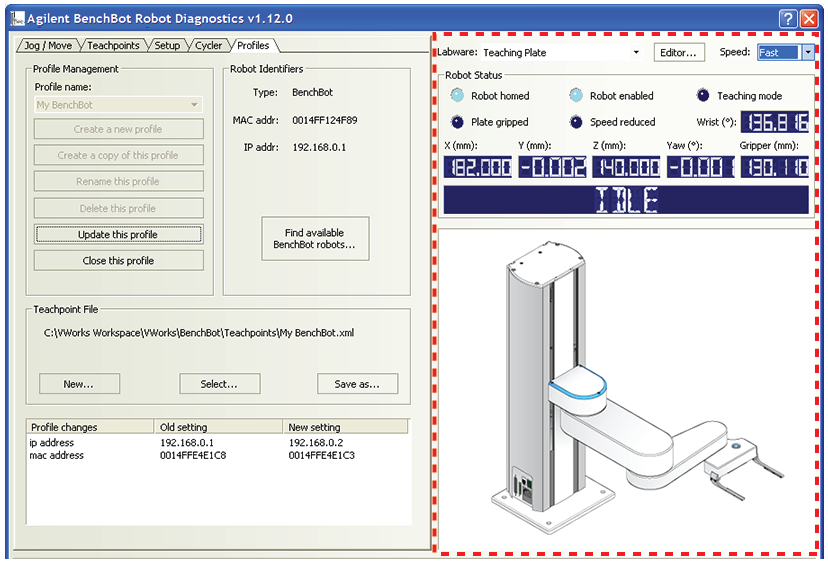
Robot status area Selection or command Description Labware Allows you to select a labware. Editor Opens the Labware Editor. Speed Sets the robot speed: Slow, Medium, or Fast. Robot homed Indicates the robot has homed successfully. Robot enabled Indicates whether the robot motor is enabled. Plate gripped Indicates the presence of labware in the robot grippers. Speed reduced Indicates that the robot is moving in the reduced-speed mode. Teaching mode Indicates if the robot is in the teach mode. X (mm) Displays the current x-axis coordinate. Y (mm) Displays the current y-axis coordinate. Z (mm) Displays the current z-axis coordinate. Yaw (°) Displays the current angle between the grippers and the x-axis. Gripper (mm) Displays the current distance, in millimeters, between the inside surface of the grippers. When the grippers are homed, the distance is 130 mm. Wrist Displays the current angle of the robot wrist. Status message Displays the current status of the robot.