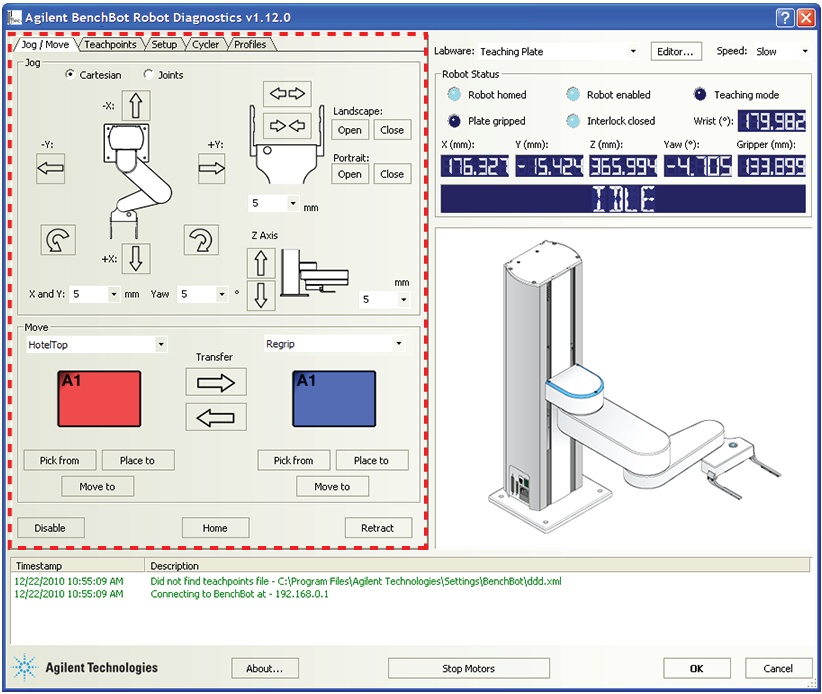
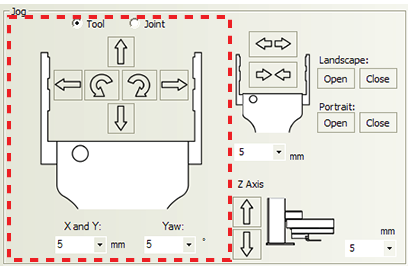
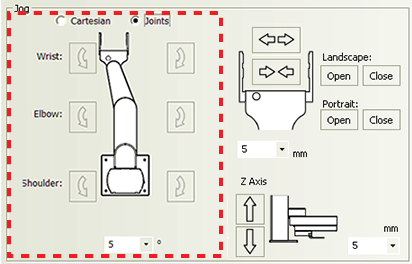
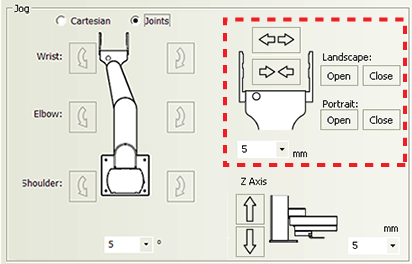
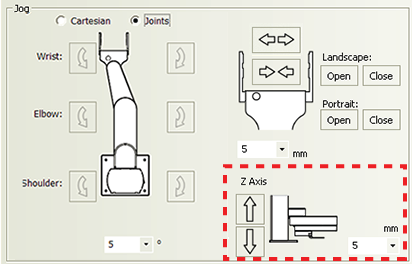
Jog/Move tab General commands Command Description Disable/Enable Disables or enables the robot joint motors. When disabling the motors, the robot will first finish the current command before stopping. For safety reasons, disabling the motors disables the joint motors only. You cannot disable the z-axis motor. Home Initializes the encoders with the correct position information, and then sends the robot to the neutral position in the robot zone. Retract Enables the robot to search for the closest teachpoint, and then use the path from that teachpoint to neutral (x, y) position in the robot zone. If the robot is unable to find a teachpoint nearby, it will retract directly into the robot zone. Jog area: Tool space commands and parameters Command or parameter Description Tool Displays the jog buttons to move the labware to a target Tool coordinate (x, y, yaw). In Tool space, all movements are measured with respect to the center of the labware. Tool space jog buttons: X: Y: Yaw: Jogs the robot in the specified direction by the specified distance in millimeters or by the specified angle in degrees. X and Y jog increment Specifies the distance, in millimeters, the robot moves when you click an x-or y-axis jog button. Yaw jog increment Specifies the angle, in degrees, the labware rotates when you click a rotating jog button. Jog area: Joint space commands and parameters Command or parameter Description Joint space Displays the jog buttons to rotate the robot’s bicep about the shoulder joint, rotate its forearm about its elbow joint, and rotate its hand about the wrist joint. Wrist/Elbow/Shoulder jog buttons: Jogs the robot in the specified direction by the specified degrees. Joint jog increment Specifies the angle, in degrees, the robot rotates when you click a rotating jog button. Jog area: Gripper commands and parameters Command or parameter Description Landscape: Open/Close Opens or closes the robot grippers to accommodate the landscape labware orientation. By default, the open distance for the landscape orientation is 132 mm. Portrait: Open/Close Opens or closes the robot grippers to accommodate the portrait labware orientation. By default, the open distance for the portrait orientation is 95 mm. Gripper jog buttons: Opens or closes the robot grippers by the specified distance. Gripper jog increment Specifies the distance, in millimeters, the robot grippers move when you click an open or close gripper jog button. Jog area: Z-axis commands and parameters Command or parameter Description Z Axis jog buttons: Jogs the robot along the z-axis in the specified direction by the specified distance. Z Axis jog increment Specifies the distance, in millimeters, the robot moves when you click one of the Z Axis jog buttons. Move area Selection or command Description Teachpoint selection Allows you to select from the list of available teachpoints. Transfer buttons: Picks up labware from a selected teachpoint and places the labware at the other selected teachpoint. Plate is Lidded Indicates that the labware you are moving has a lid and will be picked up or placed at a Lid Hotel Station or a Vacuum Delid Station. Note: The check box appears only if you select a labware that can have lids. Pick from Picks up labware from the selected teachpoint. Place to Places labware at the selected teachpoint. Move to Moves the robot grippers to the selected teachpoint.