|
|
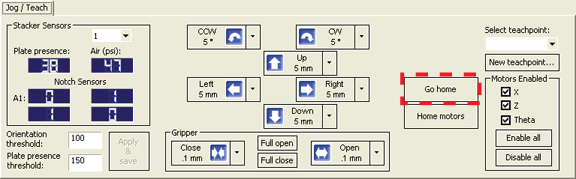
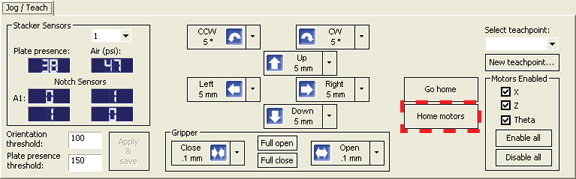
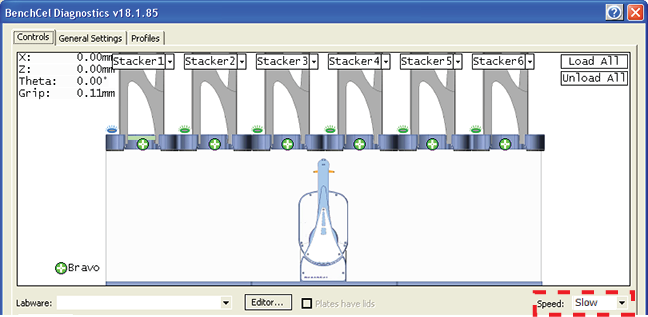
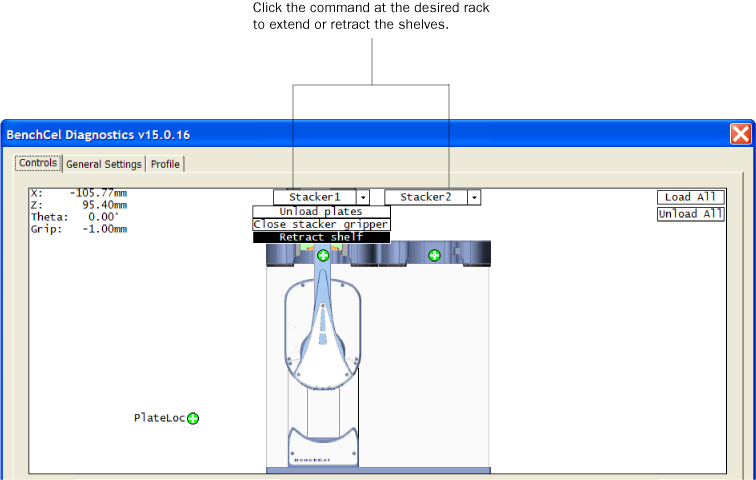
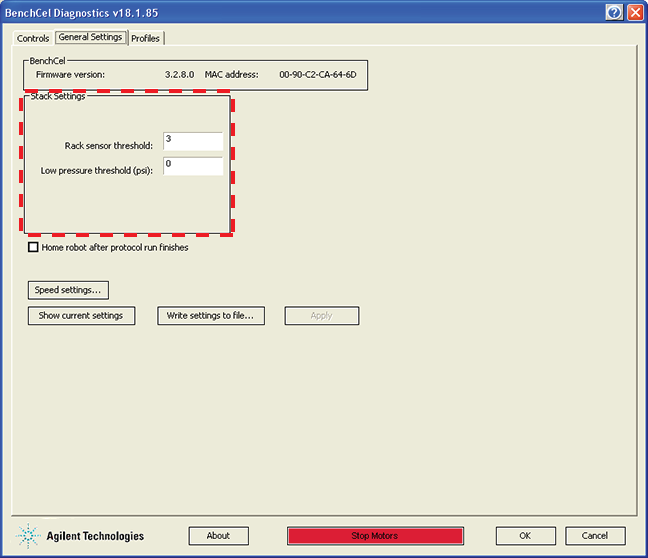
The BenchCel Diagnostics software has three tabbed pages: Controls, General Settings, and Profile. You use the commands and parameters available in the Controls and General Settings tabs when troubleshooting problems.See Quick reference for the complete list of available commands.The home position is where the robot head is at the center of the BenchCel Microplate Handler and the robot arms are perpendicular to the x-axis. You send the robot to the home position if you want the robot out of the way in a safe position.
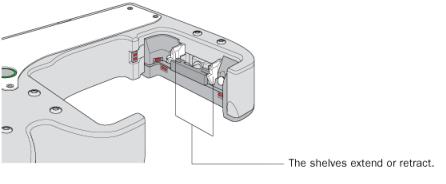
) at either of the following: