|
|
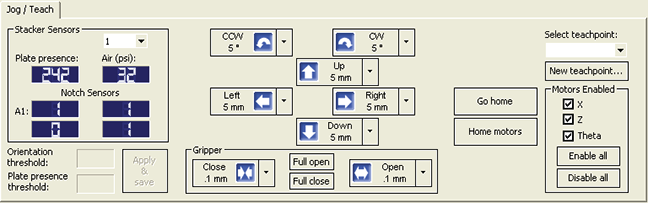
BenchCel Diagnostics - Jog/Teach tab
CCW
CW
Left
Up
Right
Down
Open
Close