|
|
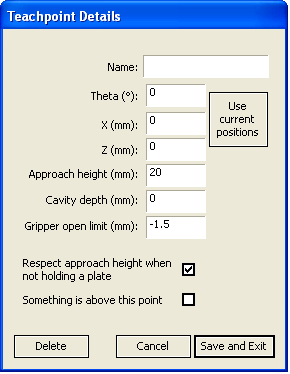
You can use the Teachpoint Details dialog box to enter a new teachpoint (Determining the teachpoint coordinates) or edit an existing teachpoint.
) for the teachpoint of interest.
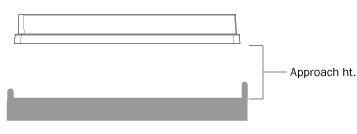
Use this setting to prevent the robot from colliding with raised tabs or walls at the teachpoint location.You can start with the approach height set to 20 mm (default). However, if there is an obstruction above the teachpoint, a smaller approach height might be required to prevent a collision.