|
|
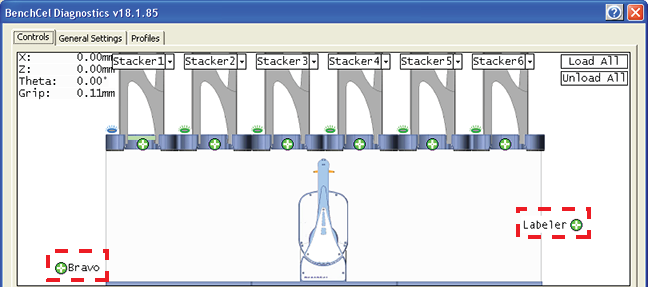
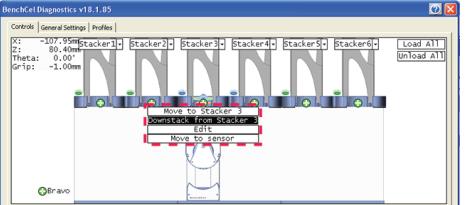
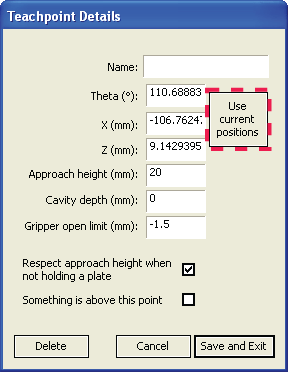
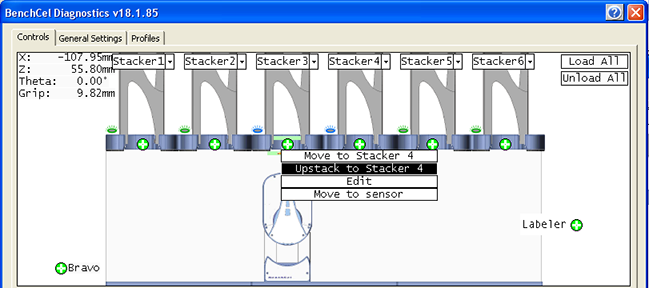
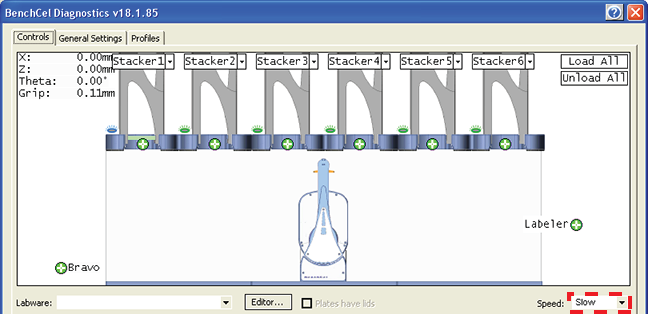
A teachpoint is a set of coordinates that define where the robot can pick up or place labware. The location can be on an external device or a platepad. You set, edit, and save teachpoints in BenchCel Diagnostics. The teachpoints are displayed as plus signs () in the graphical display area in the BenchCel Diagnostics dialog box.
Note: The graphical display area also shows teachpoints (
) or Down (
).