|
|
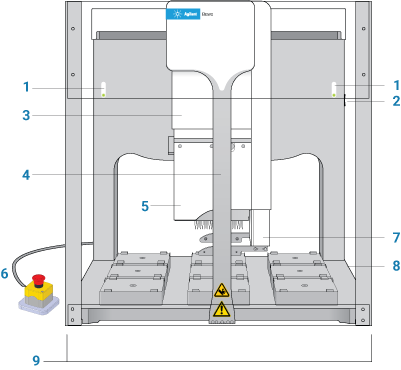
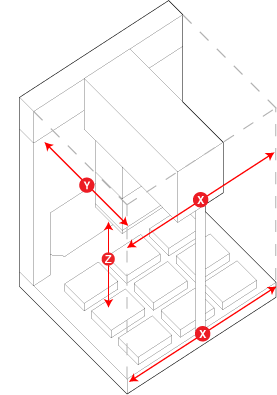
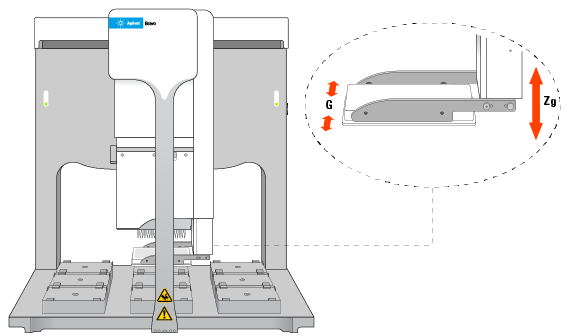
This topic describes the Bravo Platform primary hardware components and the axes of motion.The following figure and table describe the primary Bravo hardware components.Figure. Bravo Platform components (front view)
(solid blue). The Bravo Platform is turned on and in standby mode.
(flashing green). The software is running a protocol on the Bravo Platform.
(flashing orange). The software has initialized the Bravo Platform and Bravo Diagnostics is open.
(flashing red). The software has encountered an error while running a protocol or the interlock circuit is tripped.