|
|
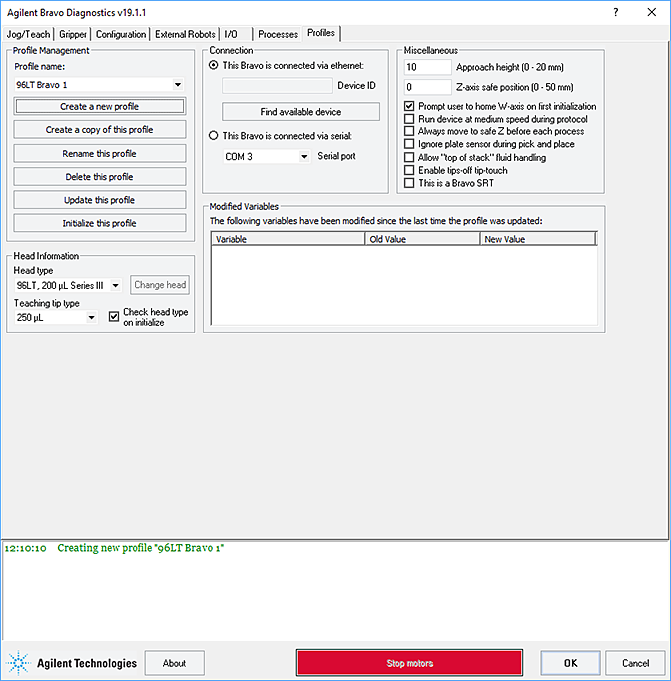
VWorks software users with Administrator or Technician privileges (advanced users) can create and manage profiles for the Bravo Platform.Each Bravo Platform that you install requires a unique profile, which enables communication settings specific to the given instrument.
A profile is a collection of settings, stored in the Microsoft Windows registry, that manages how you connect to devices. A Bravo profile does the following: