|
|
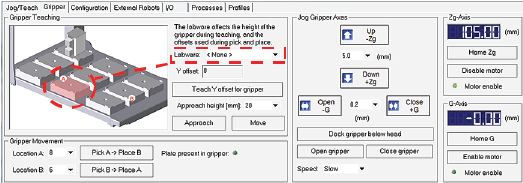
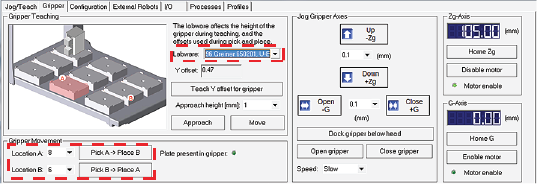
You should read this topic if the Bravo Platform includes a gripper.
Before you adjust the gripper y‑axis offset, ensure that the pipettor teachpoints (x-, y-, and z‑axes) have been verified for the given profile and no pipette tips or cartridges are installed on the head.