|
|
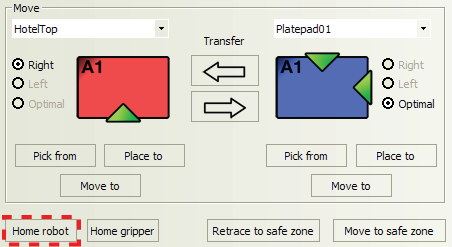
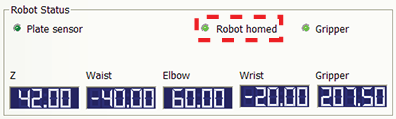
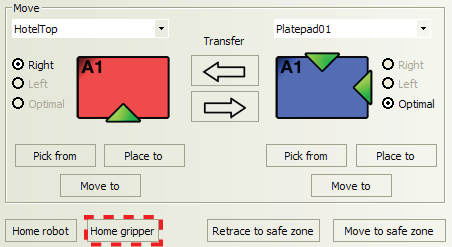
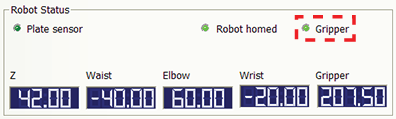
Homing the robot sends the robot to the factory-defined home position for each of the axes of motion. To home the grippers, see Homing the robot grippers.