|
|
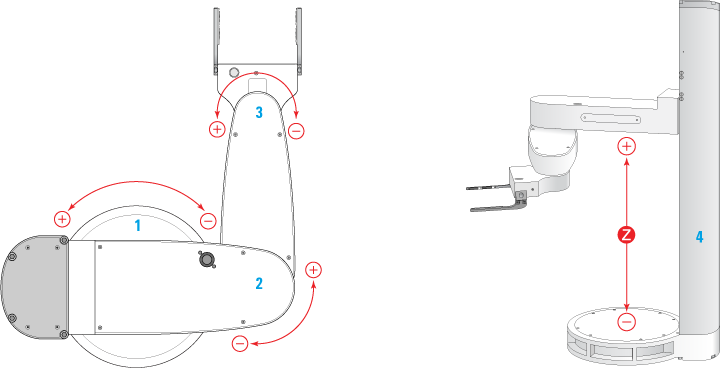
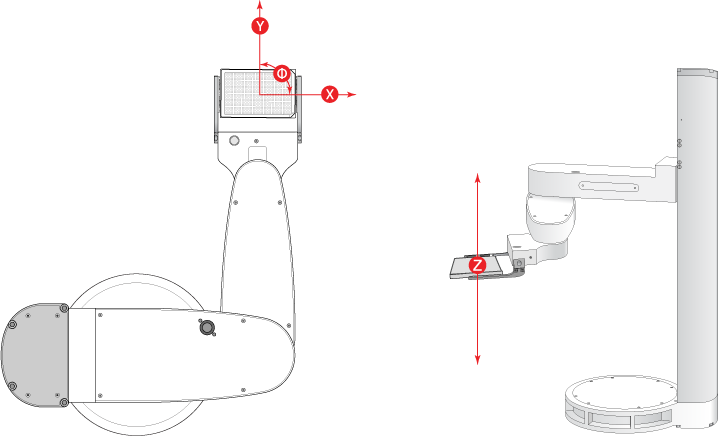
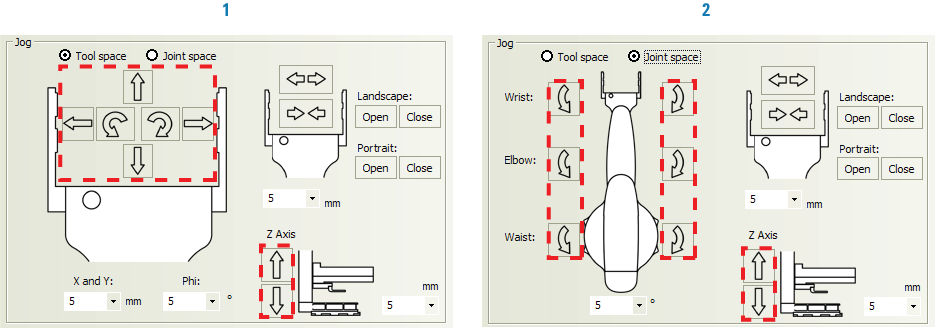
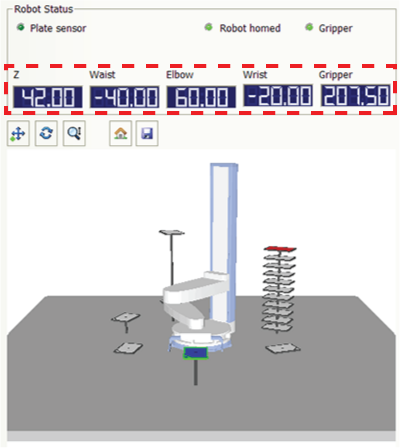
The Direct Drive Robot movements can be controlled or monitored from two different perspectives: