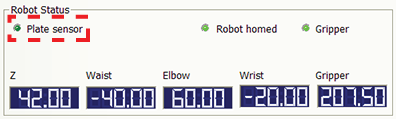
Checking the robot microplate sensor The microplate sensor under the robot hand is used to detect the presence of labware in its grip. If you suspect that the microplate sensor is not working correctly, you can check to see if it requires recalibration. To check the microplate sensor: 1 Move the robot to a teachpoint that has a labware. 2 Move the robot up so that it is at the correct robot gripper offset for the labware. 3 Close the gripper. 4 Move the robot away from the teachpoint. The microplate sensor is highly sensitive and might detect the plate stage or platepad as labware. Moving the robot away from any teachpoint would provide the most accurate detection result. 5 In the Robot Status area, check the Plate sensor indicator. If the indicator light is on, the microplate sensor is detecting a labware in its grippers. If the indicator light is off, the microplate sensor is not detecting labware. Contact Automation Solutions Technical Support to see if the sensor needs to be recalibrated. 6 Open the gripper to release the labware. Related information For information about... See... Homing the robot Homing the robot and grippers Moving the robot into the safe zone Moving the robot into the safe zone Disabling and enabling the robot motors Disabling and enabling the robot motors Changing the robot speed Changing the robot speed Stopping the robot motors Stopping the robot motors Jogging the robot Jogging the robot Opening and closing the robot grippers Opening and closing the robot grippers Changing the robot display Changing the robot display Viewing the log area Viewing the DDR Diagnostics log area