|
|
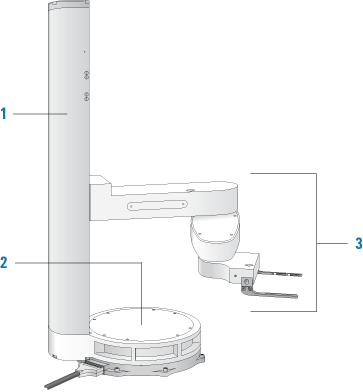
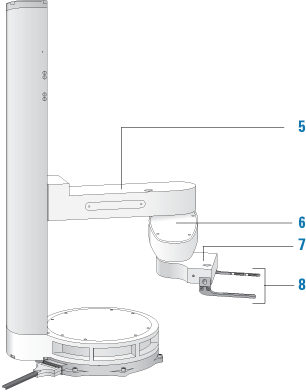
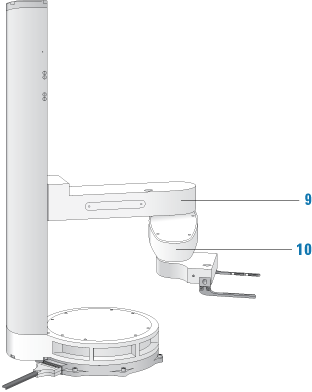
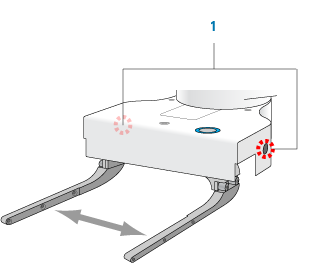
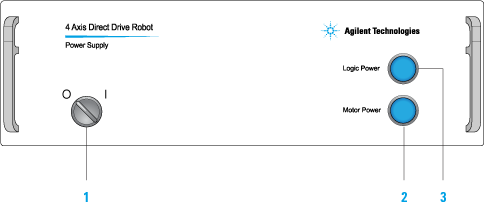
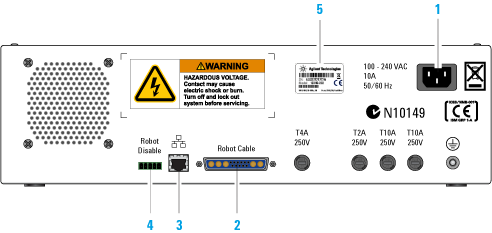
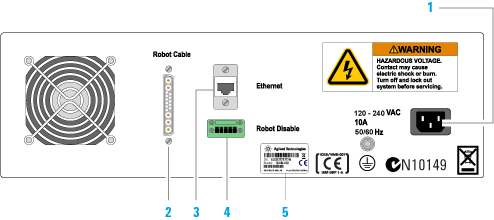
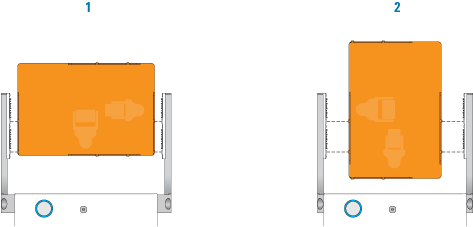
This topic describes the following Direct Drive Robot hardware features:The following diagrams show the main components of the Direct Drive Robot.