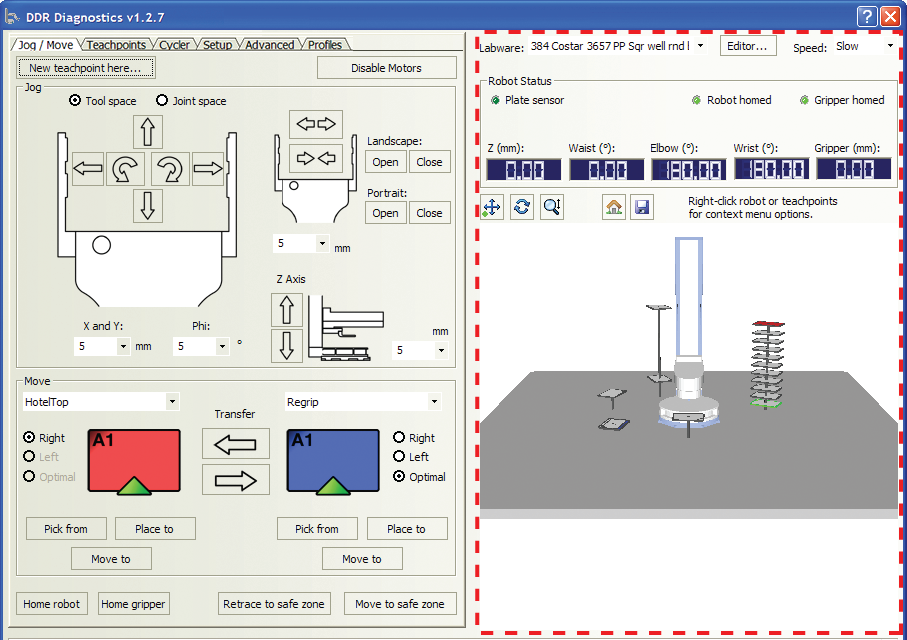
Robot status area Selection or command Description Labware Allows you to select a labware. Editor Opens the Labware Editor. Speed Sets the robot speed: Slow, Medium, or Fast. Plate sensor Indicates the presence of labware in the robot grippers. If the indicator light is on, a labware is in the robot grippers. If the indicator light is off, the sensor does not detect a labware in the robot grippers. Robot homed Indicates that the robot is in the factory-defined home position. Gripper homed Indicates that the robot grippers are in the factory-defined home position. Z (mm) Displays the current z-axis coordinate relative to the home position. Waist (°) Displays the current waist coordinate relative to the home position. Elbow (°) Displays the current elbow coordinate relative to the home position. Wrist (°) Displays the current wrist coordinate relative to the home position. Gripper (mm) Displays the current distance between the two grippers. Pans, or moves the image. Click the button, and then drag the image in the desired direction. Rotates the image. Click the button, and then drag the image to rotate it in the desired direction. Alternatively, click the middle mouse button or wheel, and then drag the image to rotate it. Increases or reduces the image magnification. Click the button, and then drag the image upward or downward to increase or decrease the magnification respectively. Alternatively, scroll the mouse wheel to change the magnification. Resets the image to the default view. Saves the current view as the default view.