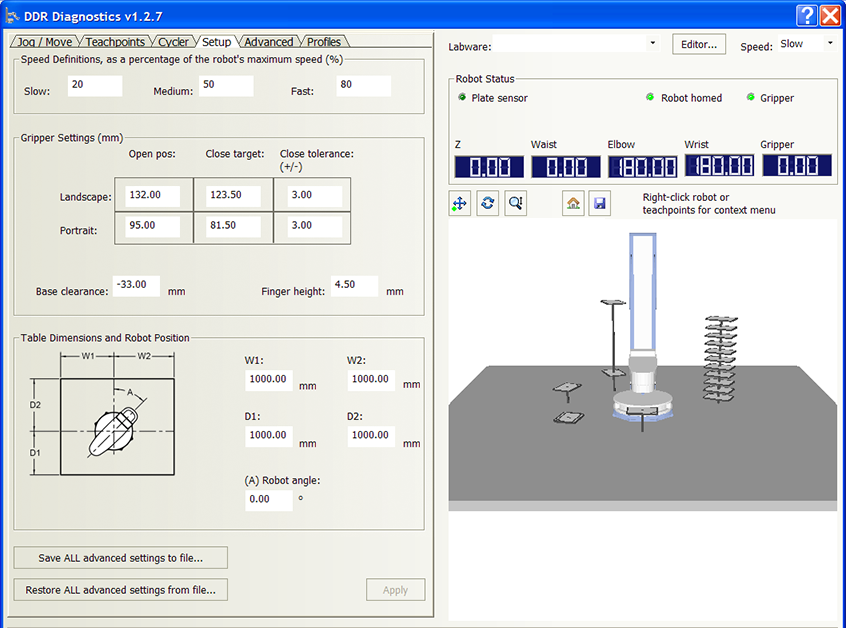
Setup tab Speed definitions The following robot speeds are definable as a percentage of the factory-set maximum speed. The default percentage settings are as follows: Speed Default Slow 20% Medium 50% Fast 80% Gripper Settings (mm) Command or option Description Open pos The distance, in millimeters, between the grippers when they are open. The default values are 132 mm (landscape) and 95 mm (portrait). Close target The approximate distance, in millimeters, between the grippers when they are closed. The default values are 123.5 mm (landscape) and 81.5 mm (portrait). The Close target value is always used in conjunction with the Close tolerance value. Close tolerance The distance, in millimeters, the Close target is allowed to vary without causing an error. The default value is +/-3 mm. Base clearance The z-axis coordinate at which the bottom of the grippers touches the top of the base. Finger height The height of the grippers, measured from the midpoint of the gripper pads. Table dimensions and Robot Position Command or option Description W1/2 The width of the robot-attachment surface. W1 and W2 specify the lengths of the two segments of the width. The line that intercepts the end of W1 and the beginning of W2 runs through the center of the robot base. D1/2 The depth of the robot-attachment surface. D1 and D2 specify the lengths of the two segments of the depth. The line that intercepts the end of D1 and the beginning of D2 runs through the center of the robot base. Robot angle The angle between the robot 0° position relative to the D-axis. Commands Command or option Description Save ALL advanced settings to file Saves the current robot settings to a file. Restore ALL advanced settings to file Restores the robot settings from the selected file.