|
|
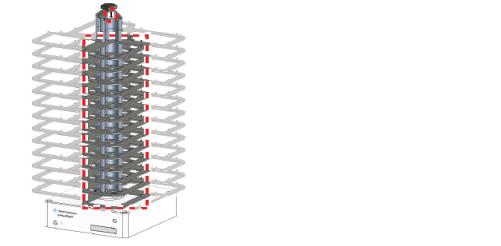
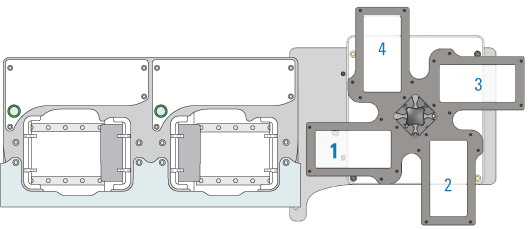
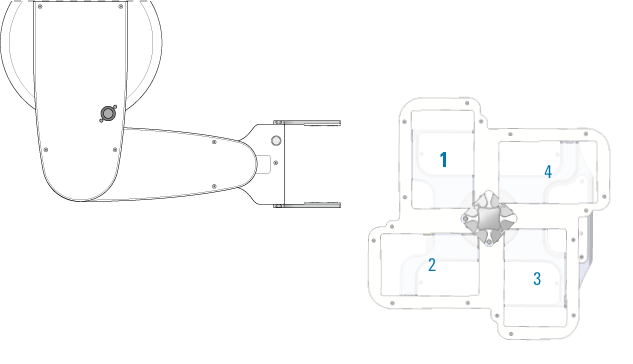
The Labware MiniHub home position is the position at which the automation robot accesses any slot in cassette 1. Cassette 1 is identified by the number 1 on the cassette cap.