|
|
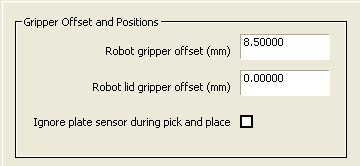
Setting Bravo Platform propertiesWhen to set Bravo propertiesIf you are operating a Bravo Platform that has a robot gripper, use this procedure to ensure that the parameter values are set correctly.To set Bravo Platform properties: