If you are using the Direct Drive Robot in your automation system, you must specify the robot properties for the labware that the robot will handle. Because the weight, material, and design varies, you specify the properties for each labware type.
The robot gripper offset range parameters tell the Direct Drive Robot where to grip a given labware type when transferring it from one device to another. Each device within a system can pose different accessibility challenges when transferring the labware. For example, some devices can have a deep, recessed area, whereas others are more flat. Some devices might have tall flanges that make it impossible for the robot to grip a microplate at a very low point.
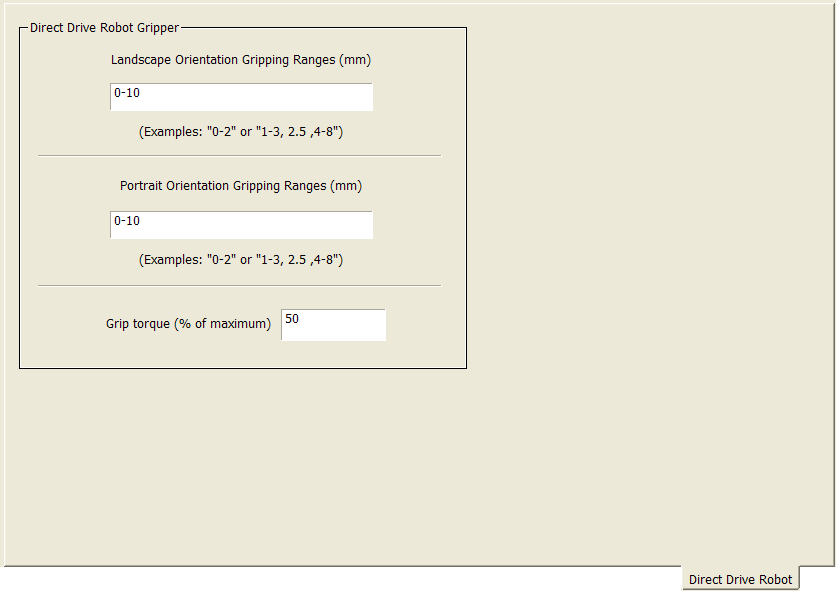
The Direct Drive Robot uses three types of gripper offset ranges to determine the most compatible grip position for the labware type: