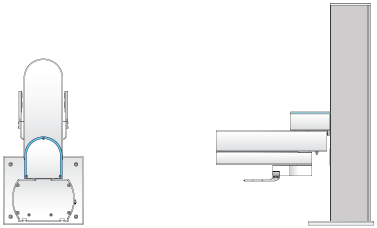
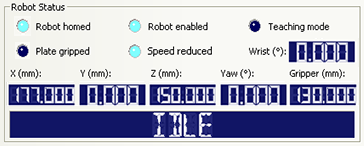
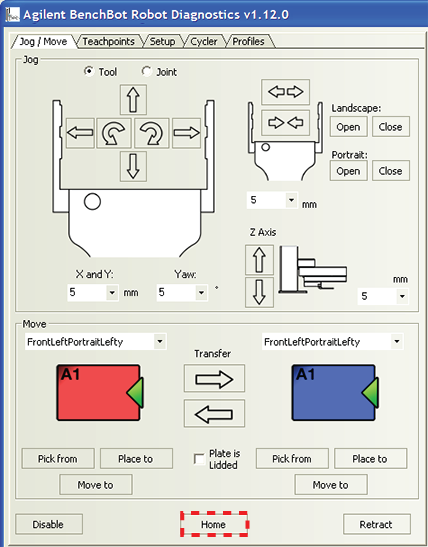
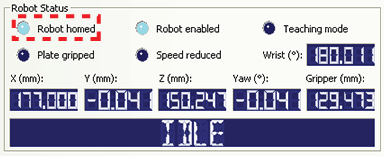
Homing the robot and grippers About the homing process The homing process does the following: • Initializes the encoders with the correct position information. • Retracts the robot to its neutral position in the robot zone. The following diagram shows the top view (left) and side view (right) of the robot in the neutral position. The neutral position coordinates are: Axis Coordinate value X 177 mm Y 0 mm Z 150 mm Yaw 0° Gripper 130 mm Note: When homed, the grippers are 130 mm apart as measured from the inside surfaces. Home the robot after turning on the robot, recovering from an emergency stop, or recovering from a crash. Before you start Make sure you enable the robot motors before homing. In the Jog/Move tab, click Enable. Procedure WARNING Be sure to wear protective eyewear when entering the system and working with the robot. WARNING Stay out of the system while the robot is in motion. To home the robot: In the Jog/Move tab, click Home. The homing process takes less than 30 seconds. During this time, the robot: • Closes its grippers slightly to check for the presence of labware in its grippers. If labware is present, the software will display an error message. Remove the labware and click Home again. • Opens the grippers to its maximum open position of 134 mm, and then closes the grippers to 130 mm. • Reads the encoders to obtain the current positions of the joints. • Rotates the wrist so that it is at the home position. After the robot homes successfully, the Robot homed indicator light turns on. Related information For information about... See... Moving the robot into the robot zone Retracting the robot into the robot zone Disabling and enabling the robot motor Disabling and enabling the robot joint motors Stopping the robot motors Stopping the robot motors Changing the robot speed Changing the robot speed Changing the robot speed definitions Changing the robot speed definitions Jogging the robot Jogging the robot Opening and closing the robot grippers Opening and closing the robot grippers Changing the gripper settings Changing the gripper settings View the Robot Status area Checking the robot status and log Viewing the log area Checking the robot status and log Updating the firmware Updating the firmware Backing up the robot firmware Backing up the robot firmware Installing new or restoring existing firmware Installing new or restoring existing firmware