|
|
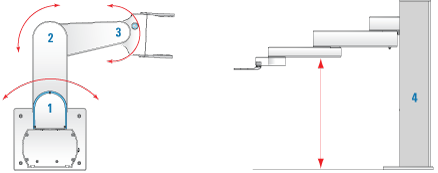
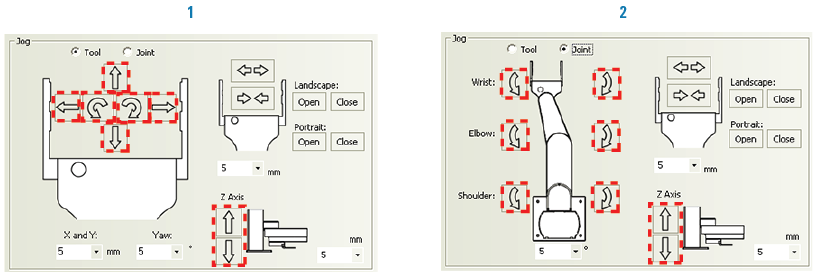
The BenchBot Robot movements can be controlled or monitored from two different perspectives:You can use a joint-space command to rotate the robot about its shoulder (1), rotate its forearm about the elbow (2), or rotate the hand about the wrist (3). In addition, you can move the robot arm up and down along the mast or z-axis (4).