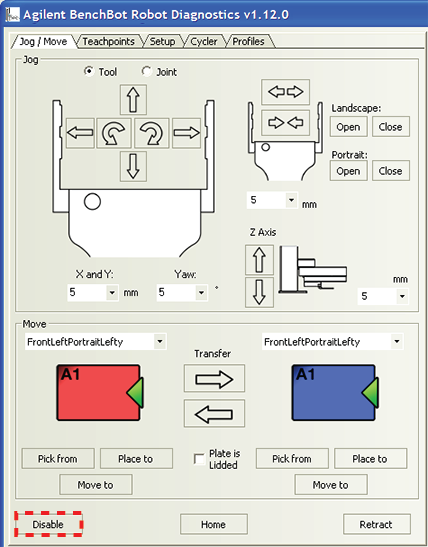
Disabling and enabling the robot joint motors Disabling the robot motors allows you to move the robot by hand. When you disable the robot motors, the robot will first finish the current command before stopping. IMPORTANT You can disable the robot joint motors, but you cannot disable the z-axis motor. Therefore, you can move the robot by hand in the plane of the robot arm, but you cannot change its height. Note: If the system is not running a protocol, and the robot remains inactive for 10 minutes, the motors are automatically disabled. WARNING The robot arm might move when the motors are being enabled. Stay out of the system when you enable the robot. To disable or enable the robot motors: In the BenchBot Robot Diagnostics Jog/Move tab, click Disable Motors or Enable Motors. Related information For information about... See... Homing the robot Homing the robot and grippers Moving the robot into the robot zone Retracting the robot into the robot zone Stopping the robot motors Stopping the robot motors Changing the robot speed Changing the robot speed Changing the robot speed definitions Changing the robot speed definitions Opening and closing the robot grippers Opening and closing the robot grippers Changing the gripper settings Changing the gripper settings View the Robot Status area Checking the robot status and log Viewing the log area Checking the robot status and log Updating the firmware Updating the firmware Backing up the robot firmware Backing up the robot firmware Installing new or restoring existing firmware Installing new or restoring existing firmware Setting teachpoints Setting teachpoints Moving labware between teachpoints • Moving the robot to the new teachpoint • Picking up labware at the teachpoint • Placing labware at the teachpoint • Transferring labware between two teachpoints