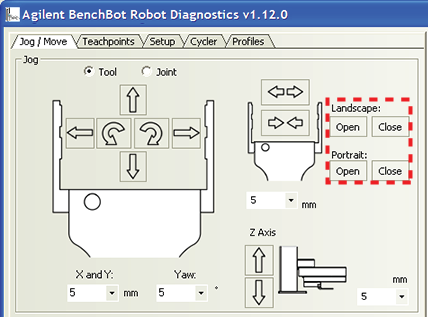
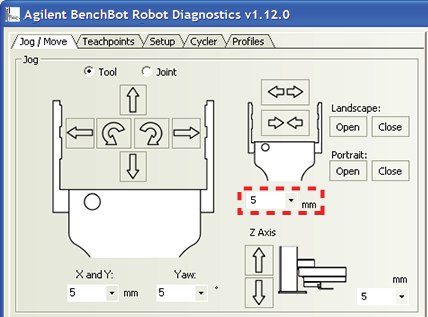
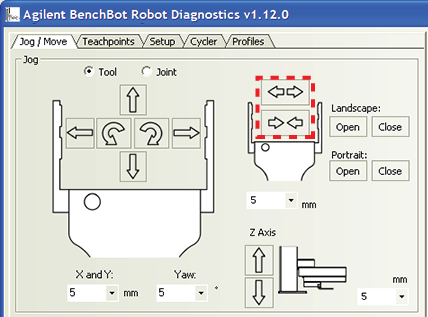
Opening and closing the robot grippers Procedure You can open the robot grippers to release labware. You can close the robot grippers to hold labware. You can open and close the grippers in one of two ways: • Use the software commands in BenchBot Robot Diagnostics. • Manually pull open and push close the grippers when the motors are disabled or in the teach mode only. IMPORTANT Manually pulling open or pushing closed the grippers while the motors are enabled will disable the motors. This topic explains how to use the software commands in BenchBot Robot Diagnostics to open and close the grippers. WARNING Be sure to wear protective eyewear when entering the system and working with the robot. WARNING Stay out of the system while the robot is in motion. To open or close the robot grippers using software commands: In the Jog/Move tab, click Open or Close for the desired orientation. To open or close the grippers incrementally: 1 In the Jog/Move tab, select or type the jog increment for the grippers. CAUTION Always select smaller jog increments so that the robot does not bump into obstacles when it opens its grip, or bend the labware when it closes its grip. IMPORTANT The jog increment applies to both grip directions. 2 Click either the Open or Close gripper button. Related information For information about... See... Homing the robot Homing the robot and grippers Moving the robot into the robot zone Retracting the robot into the robot zone Disabling and enabling the robot motor Disabling and enabling the robot joint motors Stopping the robot motors Stopping the robot motors Changing the robot speed Changing the robot speed Changing the robot speed definitions Changing the robot speed definitions Jogging the robot Jogging the robot Changing the gripper settings Changing the gripper settings View the Robot Status area Checking the robot status and log Viewing the log area Checking the robot status and log Updating the firmware Updating the firmware Backing up the robot firmware Backing up the robot firmware Installing new or restoring existing firmware Installing new or restoring existing firmware