|
|
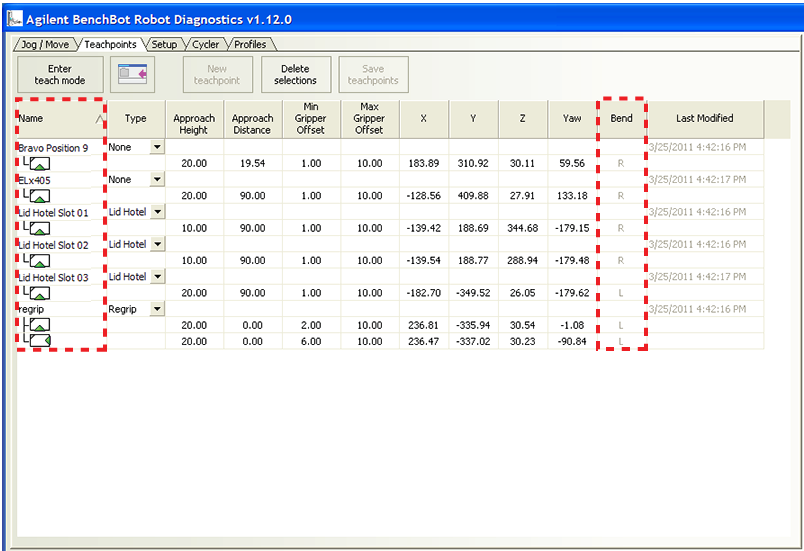
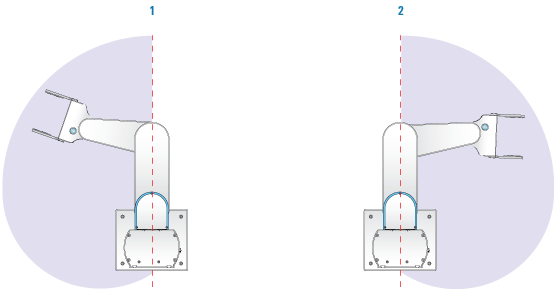
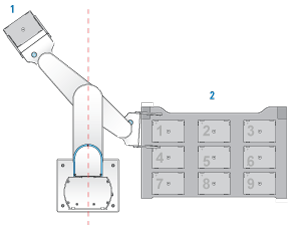
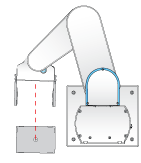
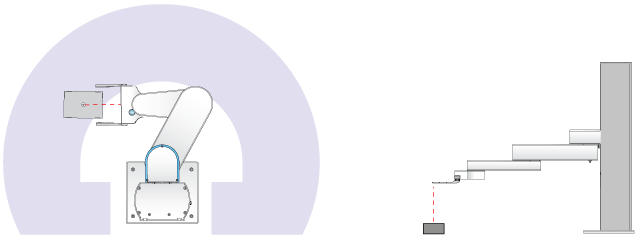
Planning BenchBot Robot teachpoints