|
|
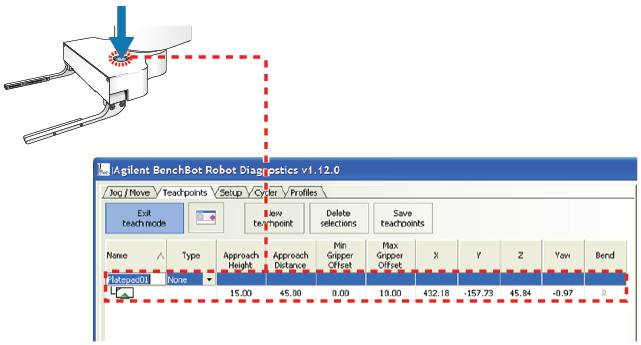
Depending on the type of device, the teachpoint setting procedure can vary. This topic provides basic teachpoint setting concepts: how to use the supplied teaching plate or the desired labware to set, verify, and edit BenchBot Robot teachpoints.
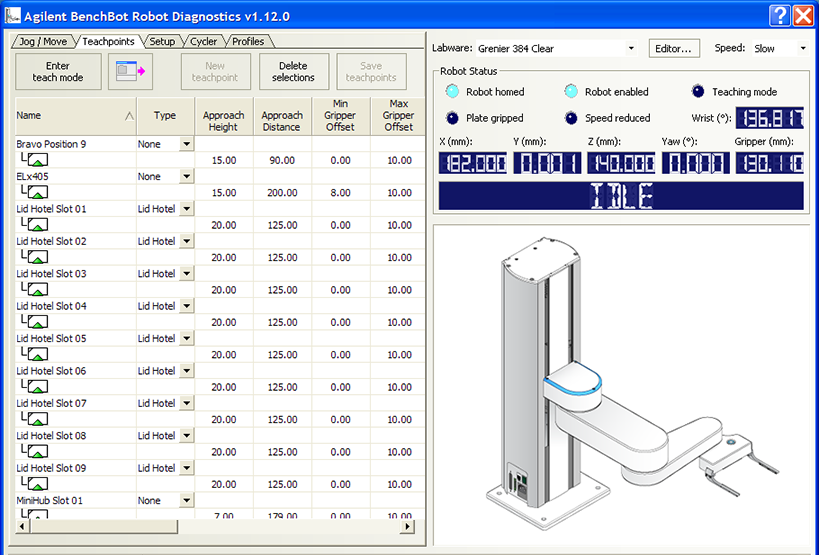
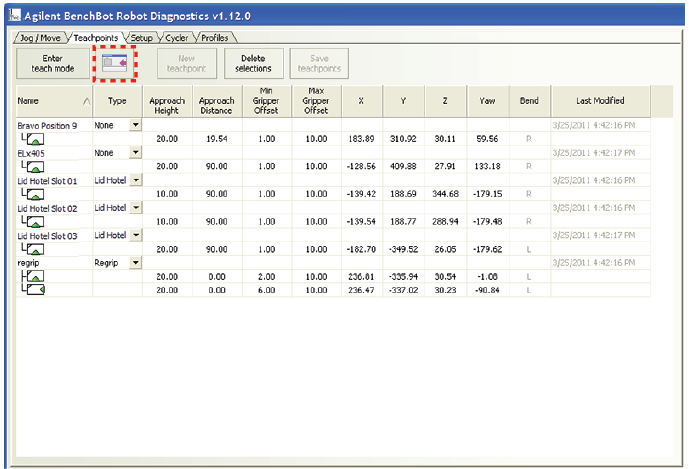
(Maximize) button. The table expands so that all of the columns are displayed in the tab. To reduce the number of columns displayed, click the
(Minimize) button.