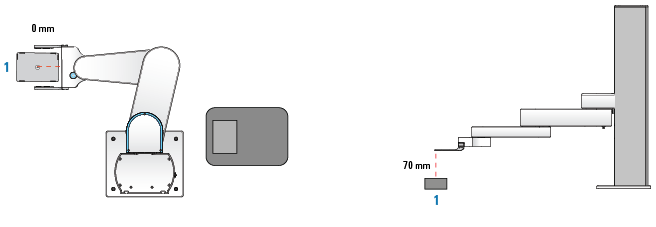
In the following diagram, the teachpoint (1) does not have obstacles nearby. In this case, set the Approach Distance at 0 mm to take advantage of the robot’s rotating movement. Because the tallest labware expected at the teachpoint is a tipbox, the Approach Height is set at 70 mm.
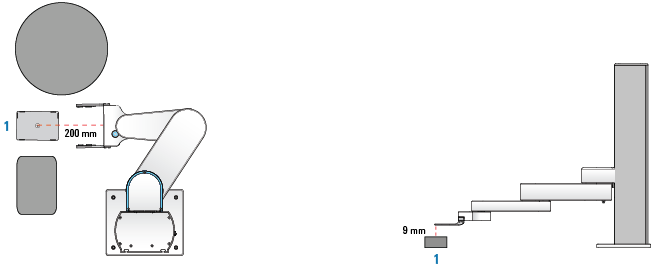
In the following diagram, the teachpoint (1) has two tall obstacles on both sides. In this case, set the Approach Distance at 200 mm (the distance that allows the robot to move to the teachpoint without bumping into the tall obstacles). The Approach Height is set at 9 mm to avoid the tabs on the front side of the teachpoint.
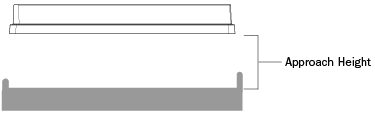
Double-click in the Approach Height box and type the desired value. The default value for the parameter is 20 mm.
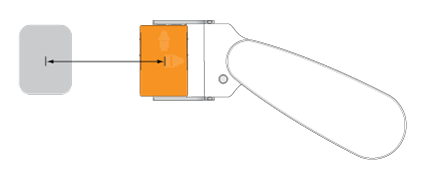
Double-click in the Approach Distance box and type the desired value. The default value is 75 mm for the landscape orientation and 125 mm for the portrait orientation.