|
|
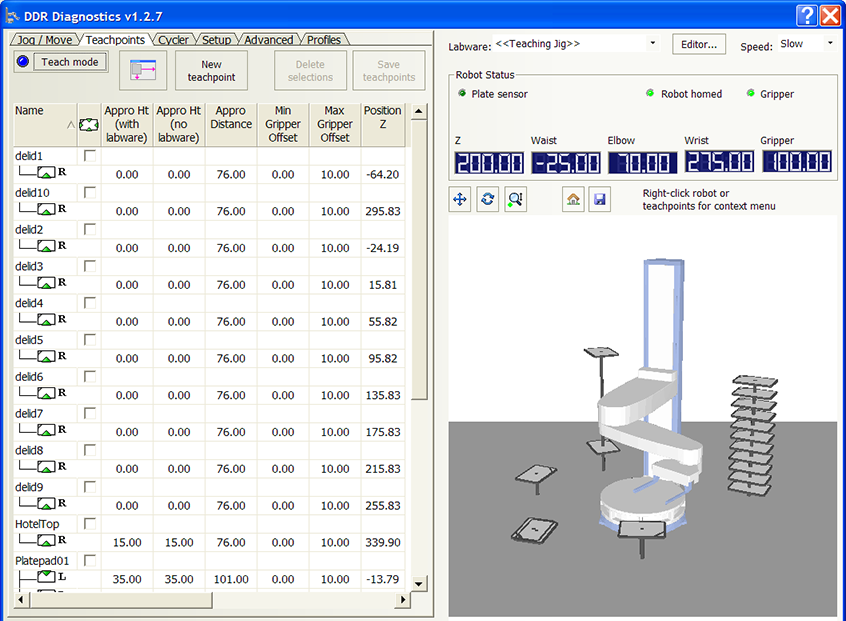
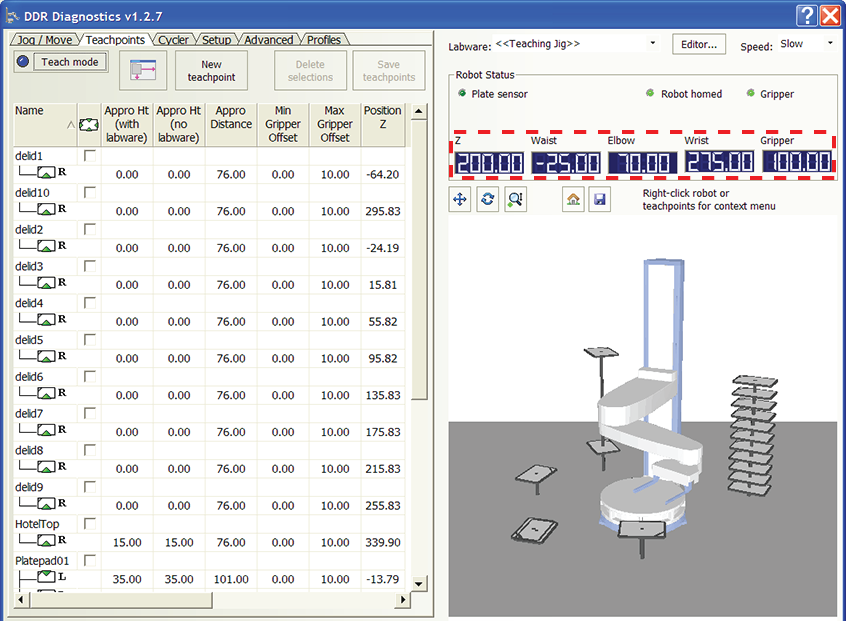
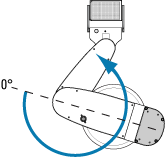
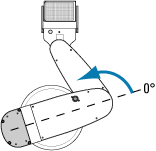
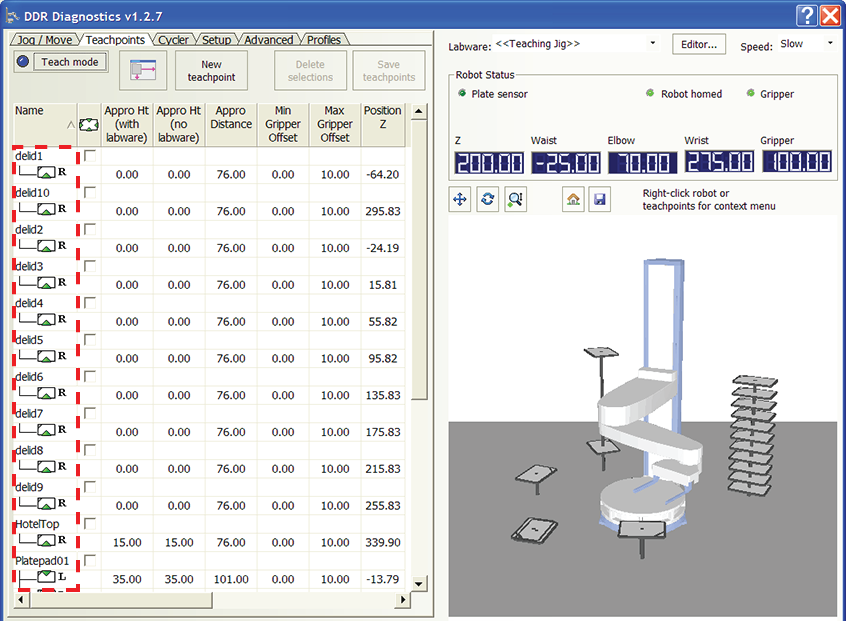
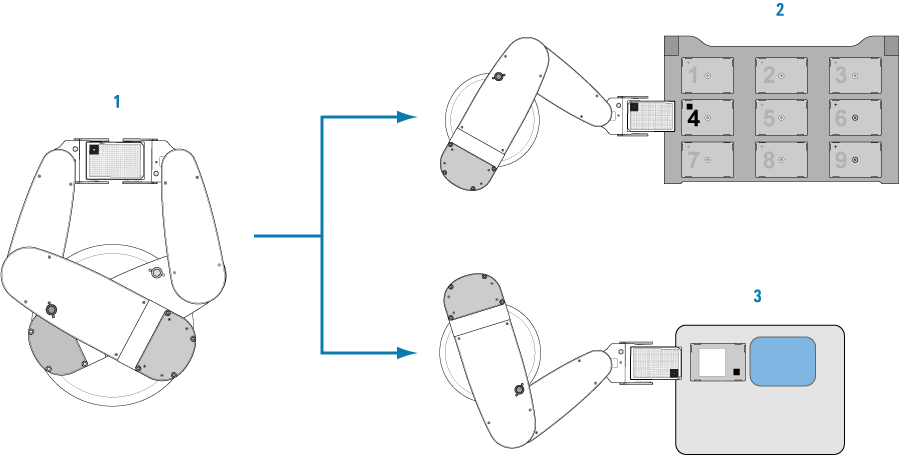
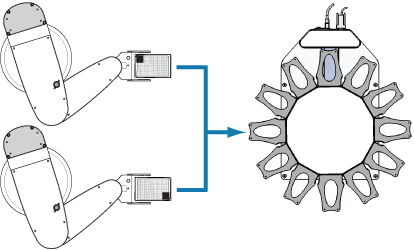
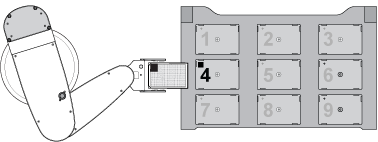
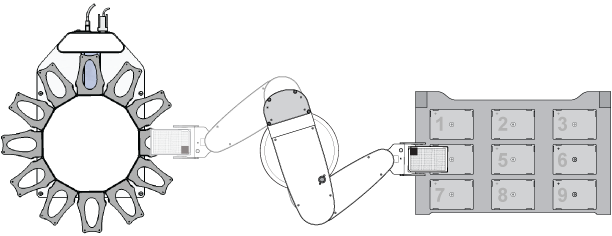
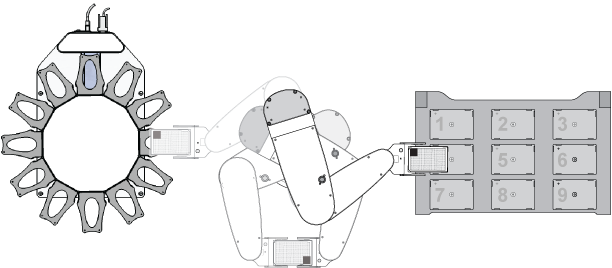
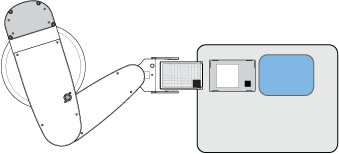
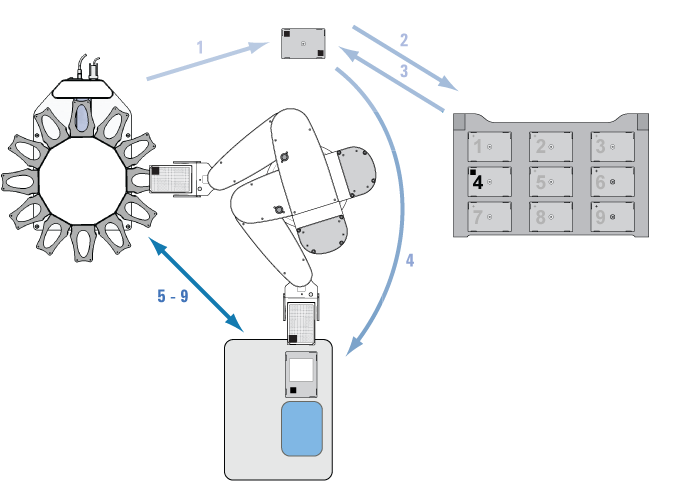
Planning Direct Drive Robot teachpointsThe Direct Drive Robot is able to hold labware in both the landscape and portrait orientations. In addition, the A1 well can be away or toward the robot grippers in either labware orientation.