|
|
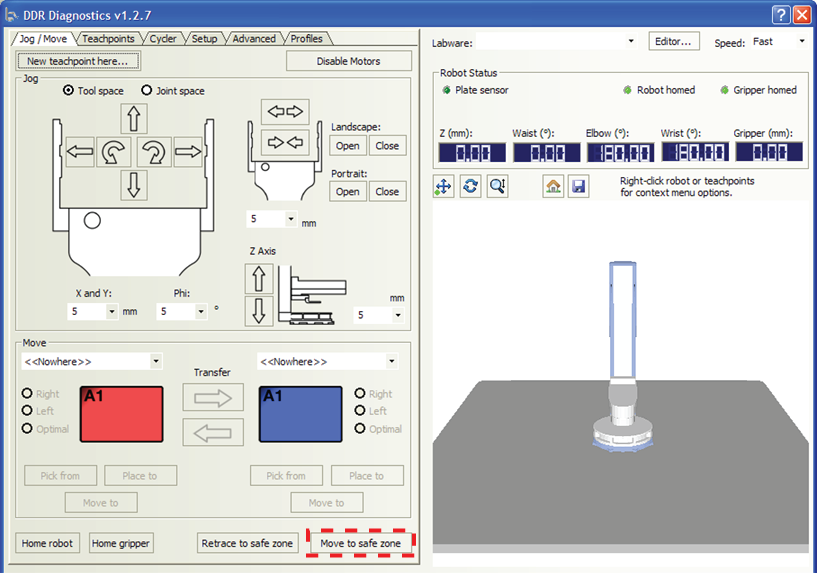
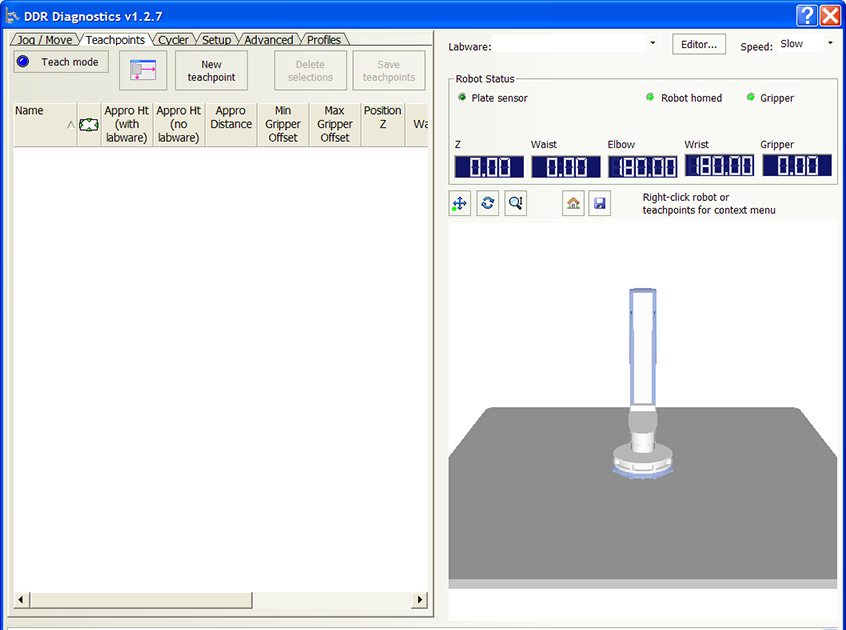
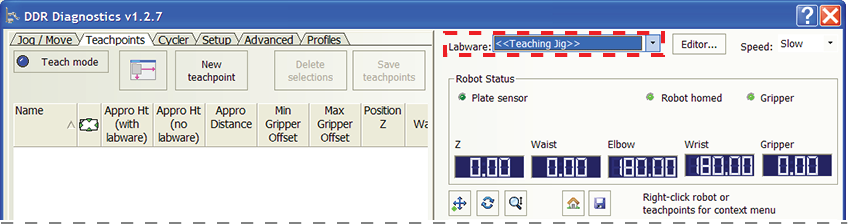
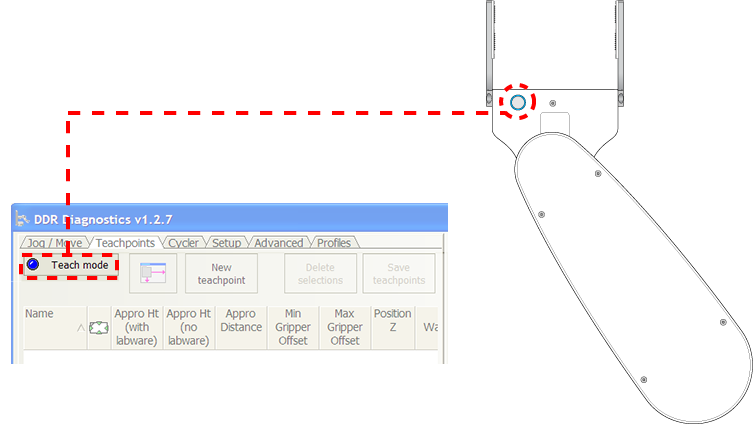
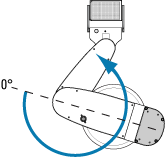
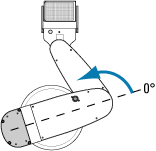
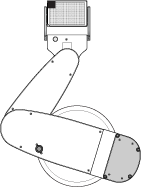
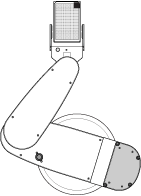
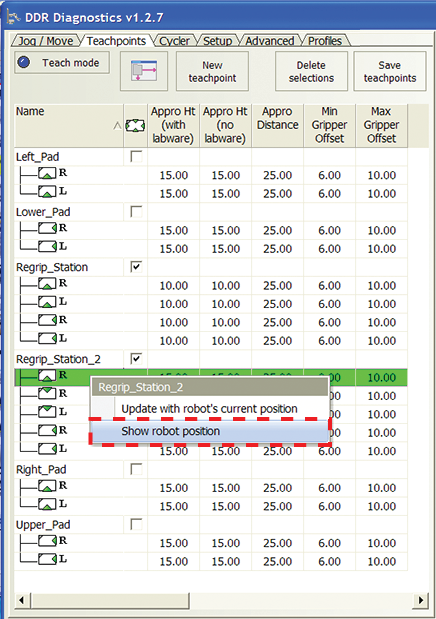
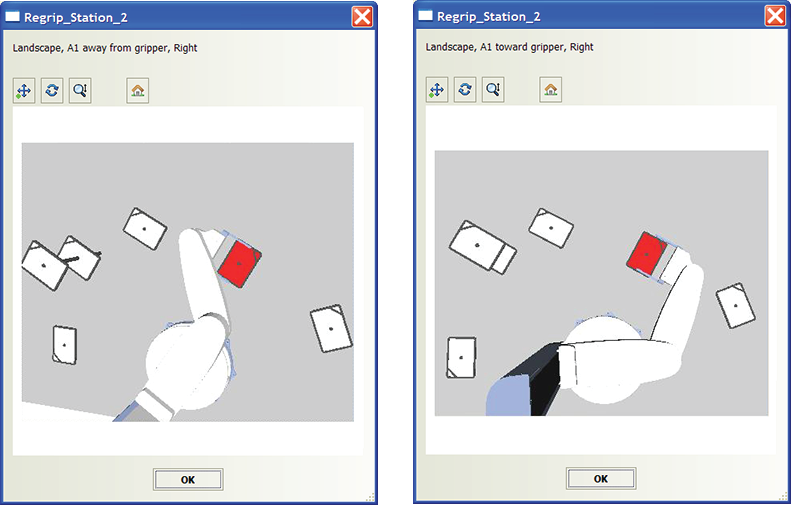
Depending on the type of device, the teachpoint setting procedure can vary. This topic provides basic teachpoint setting concepts: how to use the supplied teaching jig or the desired labware to set, verify, and edit Direct Drive Robot teachpoints.
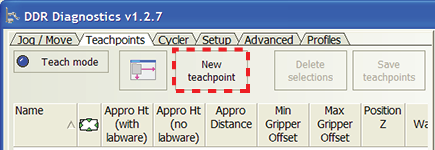
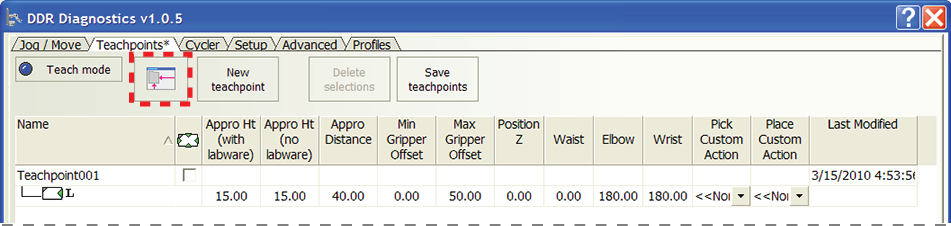
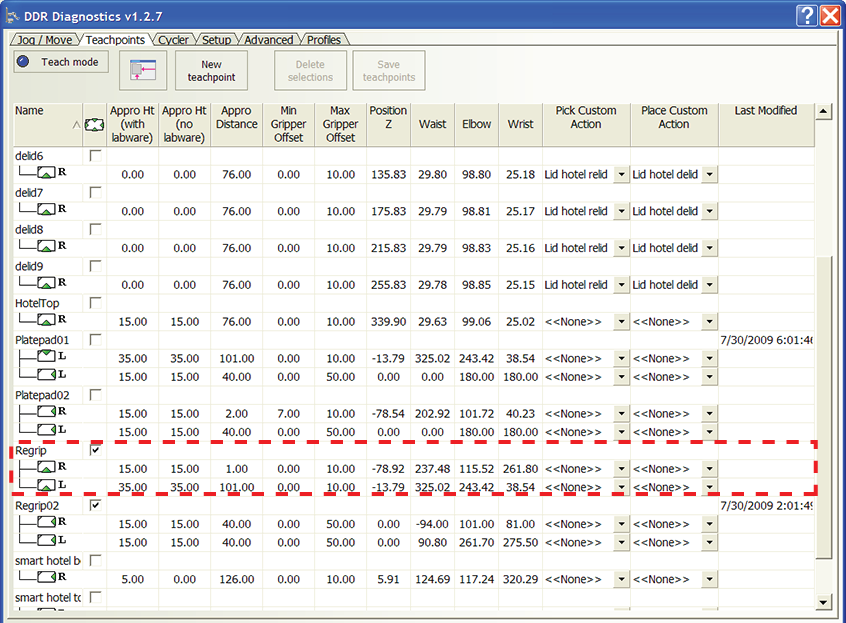
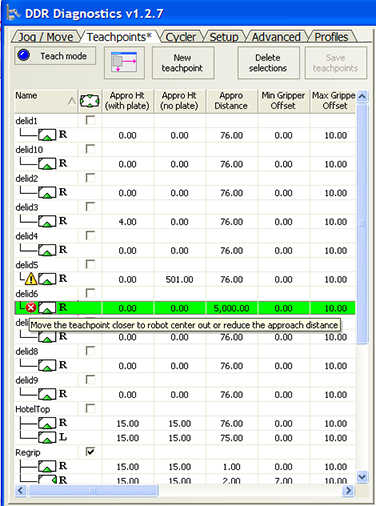
(Maximize/Minimize) button. The table expands so that all of the columns are displayed in the tab.