|
|
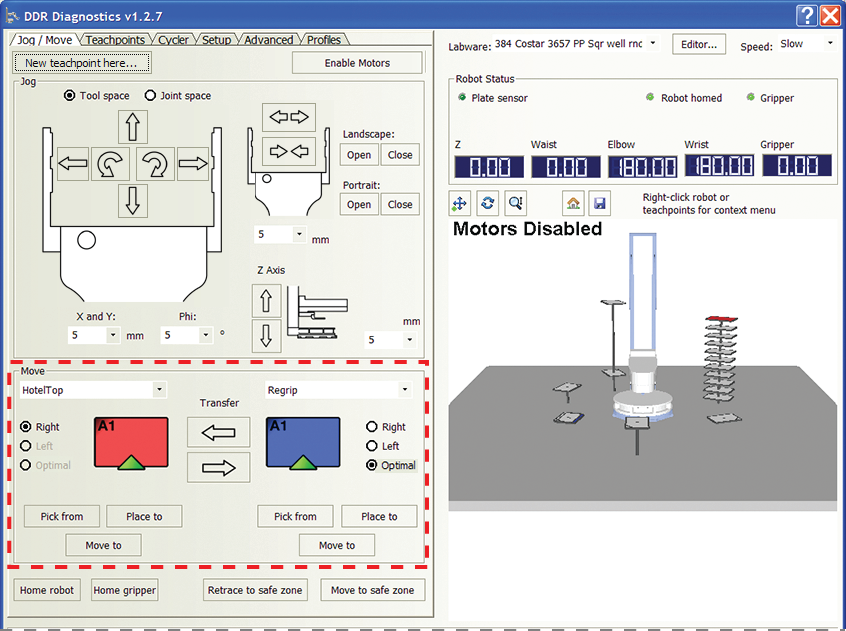
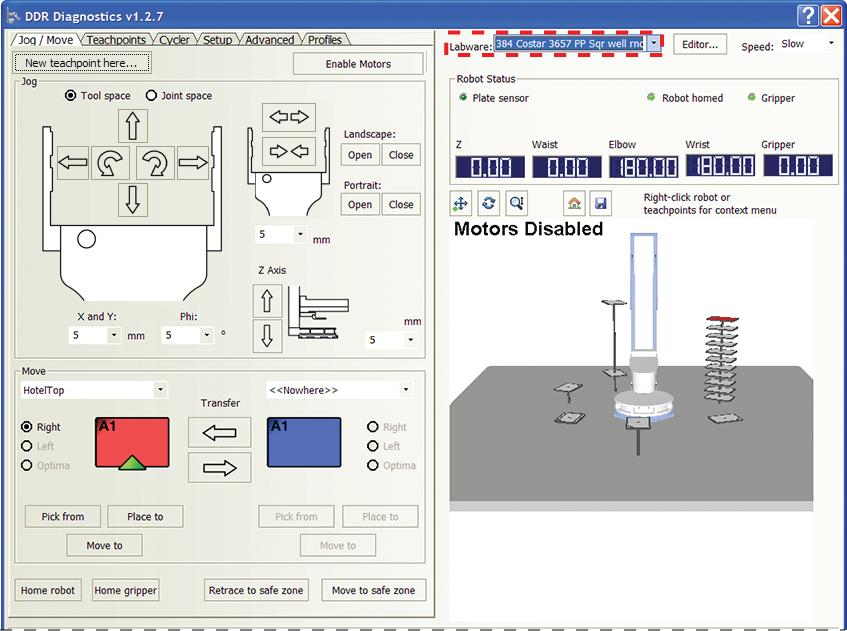
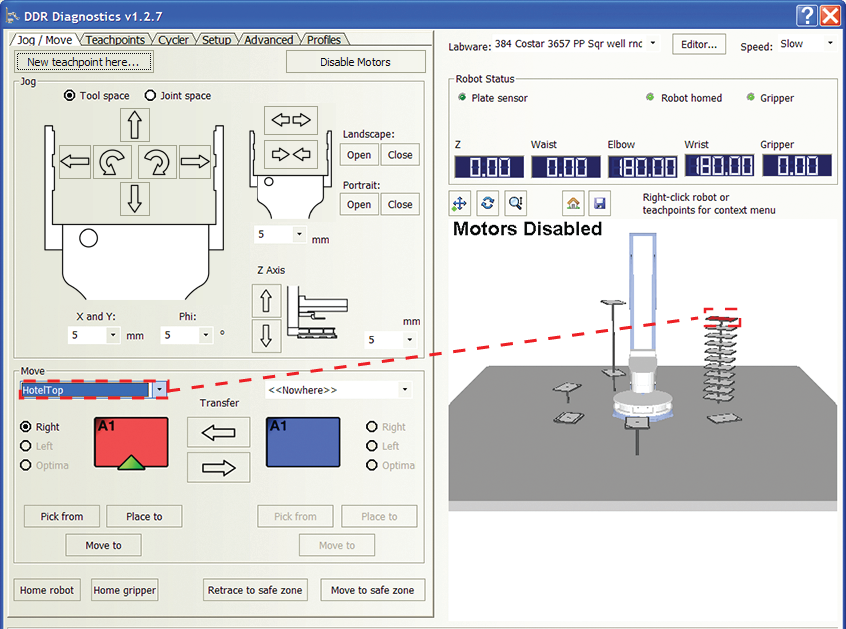
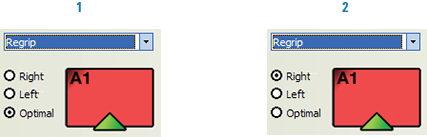
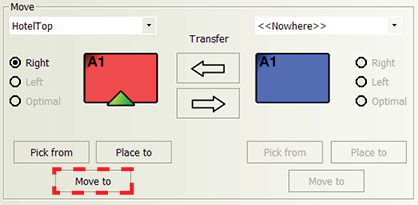
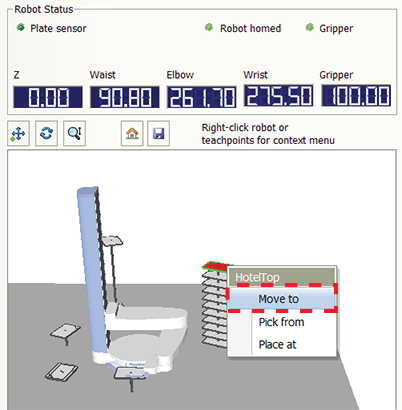
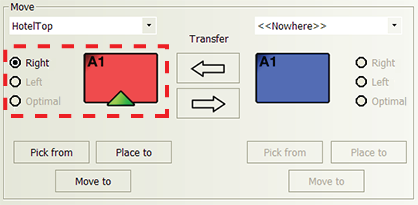
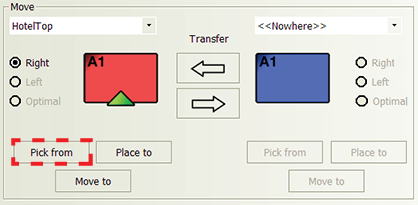
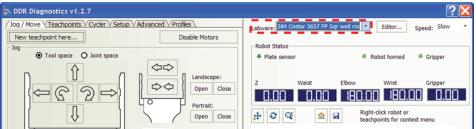
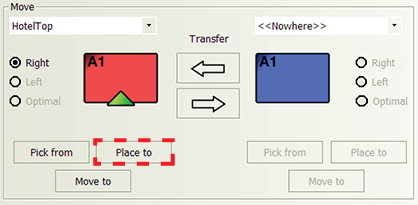
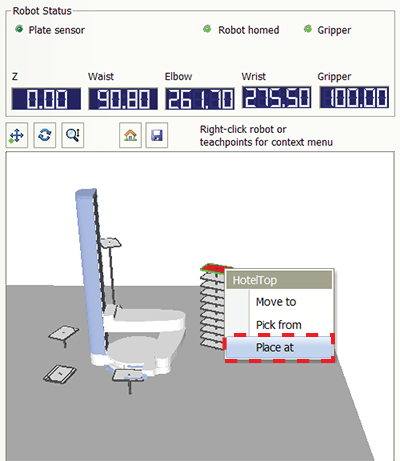
You use the commands in the Jog/Move tab for the verification procedure.