Teachpoint Details dialog box
You can use the Teachpoint Details dialog box to enter a new teachpoint (Determining the teachpoint coordinates) or edit an existing teachpoint.
To open this dialog box:
Do one of the following:
• On the Jog/Teach tab, click New teachpoint.
• In the graphical display area of the Controls page, double-click the plus sign ( ) for the teachpoint of interest.
) for the teachpoint of interest.
) for the teachpoint of interest.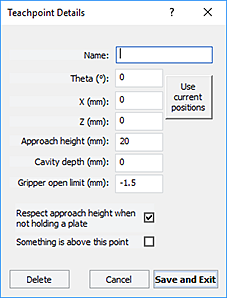 |
Parameter or command | Description |
|---|---|
Name | A name for the teachpoint. For example, if the teachpoint is on an integrated Microplate Labeler, you might want to name the teachpoint Labeler. This name appears in the graphical display area on the Controls page. |
Theta | The angle that the robot arms are from their home position, in degrees. A positive value moves the arms counterclockwise from the home position. A negative value moves the arms clockwise from the home position. The range of movement is from ‑115° to 115°. |
X | The horizontal distance (mm) from the home position. A positive value moves the robot head to the right of the home position. A negative value moves the robot head to the left of the home position. The range of movement depends on the number of stacker heads. For two stacker heads, the range is from ‑145 mm to 145 mm. |
Z | The vertical distance from the home or lowest z‑axis position. A positive value moves the robot head up from the home position. A negative value moves the head down from the home position. The range of movement is from ‑1.5 mm to 104 mm. |
Use current positions | The command that reads the robot’s current coordinates and writes them in the Theta, X, and Z boxes. |
Approach height | The height clearance (mm) the robot maintains above the teachpoint as it moves towards or away from the teachpoint location. The valid range is from 0 mm to 40 mm. 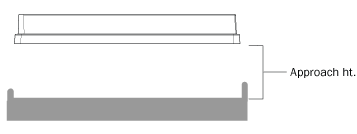 Use this setting to prevent the robot from colliding with raised tabs or walls at the teachpoint location. You can start with the approach height set to 20 mm (default). However, if there is an obstruction above the teachpoint, a smaller approach height might be required to prevent a collision. Note: This value applies when the robot is holding a microplate. When it is not holding a microplate, the robot will approach the teachpoint at the height of the teachpoint, unless you select the Respect approach height when not holding a plate option. |
Cavity depth | This setting is not commonly used and should be set at 0 mm for most applications. You can use this setting to account for teachpoints that have a depth (or negative height). To do this, type the depth (mm) as an offset to the Robot gripper offset. A positive value causes the grippers to grab higher on the plate by the specified amount. A negative values causes the grippers to grab lower on the plate. For example, suppose the Robot gripper offset is 5 mm and the platepad you want to use has depth of 9 mm. When the microplate sits in the platepad, the robot grippers cannot reach the offset height, as the following diagram shows. To account for this depth, you can set the Cavity depth at –9 mm. The robot grippers will grip the microplate 9 mm above the 5 mm offset (at 14 mm). 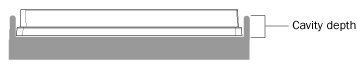 |
Gripper open limit | The maximum distance (mm) the robot grippers are allowed to open as they prepare to grip the microplate at the teachpoint. The maximum value you set is less than or equal to the Robot Gripper Open Position value set in the Labware tab. Use this setting if the teachpoint area is narrower than the robot grippers open position. (To see this value, click Save and exit, and then click the Labware tab on the Controls page.) Note: This value is used only at the teachpoint and not during other operations. |
Respect approach height when not holding a plate | Select the check box to use the approach height even when the robot is not holding labware. |
Something is above this point | The option to limit the robot’s movements within the robot safe zone. With this selection, the robot will only move along the theta-axis as long as all of its parts (head, arms, and grippers) are within the safe zone when approaching or moving away from the teachpoint.  Clear the check box to allow the robot to use the workspace. The robot’s theta-axis movements are not limited when approaching and moving away from the teachpoint.  Select the check box to limit the robot’s movements to prevent collision when approaching a teachpoint. For example, when moving labware to and from a multi-shelf device such as the Vertical Pipetting Station, this option prevents the robot from colliding with the shelf above the target teachpoint. |