Emergency stops
The BenchCel Microplate Handler is equipped with an interlock circuit and emergency-stop pendant.
Stopping in an emergency
To perform an emergency stop:
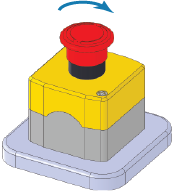
Press the red button on the pendant. The safety interlock circuit is interrupted, disabling the robot motors. The BenchCel Microplate Handler operation stops.
 |
Recovering from an emergency stop
After you press the button on the emergency-stop pendant, the robot stops. One of the following occurs:
• If you stopped a protocol run, a dialog box opens in the VWorks software.
• If you stopped the robot while diagnosing problems in BenchCel Diagnostics, a motor-disable message appears on the screen.
Use the following procedure to recover in either case.
To recover the BenchCel device after an emergency stop:
1 If the robot dropped labware before or during the emergency stop, remove labware that was dropped. Also remove labware at teachpoints or other locations.
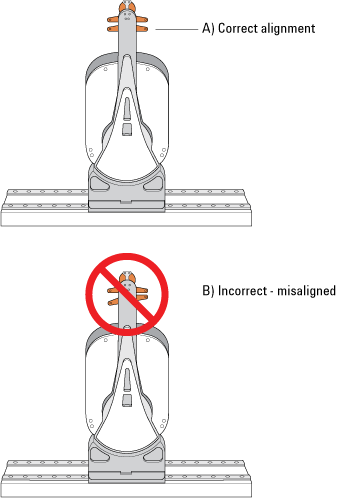
2 If the BenchCel robot attempted to place labware at a location that was not free, a collision might have occurred resulting in misalignment of the robot gripper. Check the robot gripper alignment:
a Move the robot arms so that they are perpendicular to the x-axis.
b Make sure the bottom of the robot gripper pads are perpendicular to the robot arms. If they are not, contact Agilent Technical Support.
Figure Gripper alignment: (A) correct alignment, and (B) incorrect alignment
 |
3 To re-enable the motors:
a At the emergency-stop pendant, turn the button clockwise to release it.
 |
b In the VWorks software message dialog box, select an appropriate option to continue:
Selection | Description |
|---|---|
Diagnostics | Opens the BenchCel Diagnostics dialog box. See step 4. Note: This selection is available only when you are in the middle of a protocol run and not while you are in BenchCel Diagnostics. |
Retry | Attempts to restart the current command or task in the run. |
Ignore and continue | Ignores the current command or task and continues to the next command or task in the protocol sequence. |
Abort | Aborts the current command or task in the run. Select Abort if you have determined that the protocol run is not recoverable. |
For a full description of the selections, see the VWorks Automation Control User Guide.
4 Optional. In BenchCel Diagnostics, use the available commands to manually move the robot or other components, including:
• Release the microplate that the robot is currently holding.
• Upstack the microplate that the robot is currently holding.
• Replace the lid on the microplate.
• Home the robot.
• Verify teachpoints.
For details, see Diagnostic tools.
If a physical crash occurred, always start BenchCel Diagnostics to home the robot and verify teachpoints.
Related information
For information about… | See… |
|---|---|
Pausing and resuming protocol runs | VWorks Automation Control User Guide |
Using commands in BenchCel Diagnostics | |
Complete list of available commands in BenchCel Diagnostics | |
Reporting a problem |