Diagnostic tools
About this topic
The BenchCel Diagnostics software has three tabbed pages: Controls, General Settings, and Profile. You use the commands and parameters available in the Controls and General Settings tabs when troubleshooting problems.
This topic explains how to use the commands and parameters in the Controls and General Settings tabs to do the following:
See Quick reference for the complete list of available commands.
Sending the robot to the home position
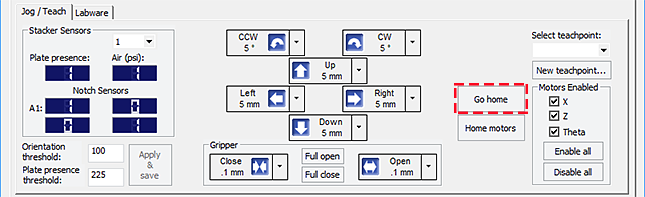
The home position is where the robot head is at the center of the BenchCel Microplate Handler and the robot arms are perpendicular to the x-axis. You send the robot to the home position if you want the robot out of the way in a safe position.
To send the robot to the home position:
1 On the BenchCel Diagnostics Controls page, click the Jog/Teach tab.
2 Click Go Home.
 |
Homing the robot
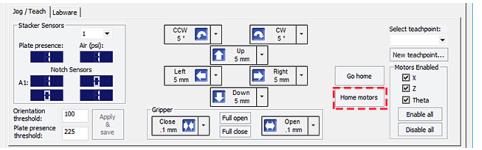
Homing the robot sends the robot to the factory-defined home position for each axis of motion. The homing process recalibrates the robot position along each axis. Home the robot if you notice that the robot is not accurately picking up or placing plates. You might also want to home the robot after recovering from an emergency stop.
Note: If a labware definition is selected when you click Home motors, the robot grippers return to the Gripper open position defined for the selected labware.
To home the robot:
1 On the BenchCel Diagnostics Controls page, click the Jog/Teach tab.
2 Click Home motors.
 |
Disabling and enabling the robot motors
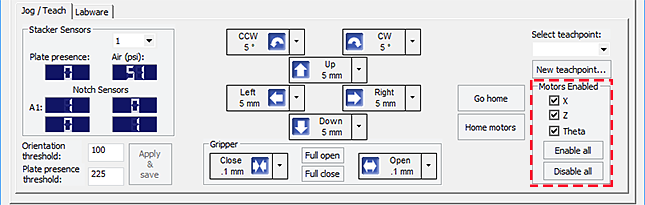
Disabling the robot motors allows you to move the robot by hand, making it easier to set and edit teachpoints.
To disable or enable the robot motors:
1 On the BenchCel Diagnostics Controls page, click the Jog/Teach tab.
2 In the Motors Enabled area, select or click the following:
 |
Option or command | Description |
|---|---|
X | Select the option to enable the x‑axis motor. Clear the check box to disable the x‑axis motor. |
Z | Select the option to enable the z‑axis motor. Clear the check box to disable the z‑axis motor. |
Theta | Select the option to enable the theta-axis motor. Clear the check box to disable the theta-axis motor. |
Enable All | Click to turn on all the motors. |
Disable All | Click to turn off all the motors. |
Jogging the robot
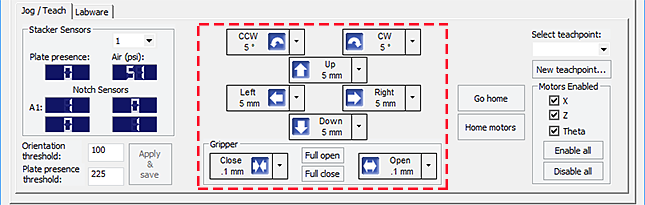
Jogging the robot moves the robot and robot grippers in small, precise increments along one of the axes. You can jog the robot to fine-tune its position when creating and editing teachpoints.
To jog the robot:
1 On the BenchCel Diagnostics Controls page, click the Jog/Teach tab.
2 Enable the robot motors. See Disabling and enabling the robot motors.
3 In the robot movement area, select the jog distance from the corresponding increment list, if applicable.
 |
 |
4 Click the directional button:
Command | Description |
|---|---|
 | Jogs the robot arm counterclockwise from the current position by the specified theta-axis increment. |
 | Jogs the robot arm clockwise from the current position by the specified theta-axis increment. |
 | Jogs the robot head left from the current position by the specified x-axis increment. |
 | Jogs the robot head right from the current position by the specified x-axis increment. |
 | Jogs the robot head up from the current position by the specified z-axis increment. |
 | Jogs the robot head down from the current position by the specified z-axis increment. |
 | Opens the robot grippers by the specified grip increment. |
 | Closes the robot grippers by the specified grip increment. |
Full Open | Opens the robot grippers to the Robot Gripper Open Position value set in the Labware tab. |
Full Close | Closes the robot grippers to the Robot Gripper Holding Stack value set in the Labware tab. |
Changing the robot speed
The speed you select in BenchCel Diagnostics applies only to the robot commands in BenchCel Diagnostics (Jog, Move, Transfer, and so on). If the robot is holding a microplate, the slower of the following will be applied: the speed you selected in the Labware Editor or the speed you selected in BenchCel Diagnostics.
You can select the robot speed to accommodate the task you are performing. For example, you can select the Slow speed when you are creating new teachpoints, creating and testing protocols, or diagnosing problems with the system.
You can adjust the speed setting for the x‑axis, z‑axis, and theta-axis for each speed (high, medium, or slow) as a percentage of the factory-set maximum speed.
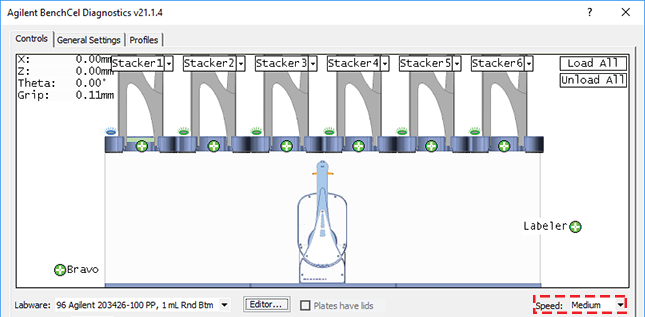
To select the robot speed:
1 In BenchCel Diagnostics, click the Controls tab.
2 In the Speed list, select Fast, Medium, or Slow.
 |
Note: During a protocol run, the robot uses the speed selection in the VWorks Tools > Options dialog box. If the robot is holding a microplate, the slower of the following will be applied: the speed in the Labware Editor or the speed in the Tools > Options dialog box. For more information, see the VWorks Automation Control User Guide.
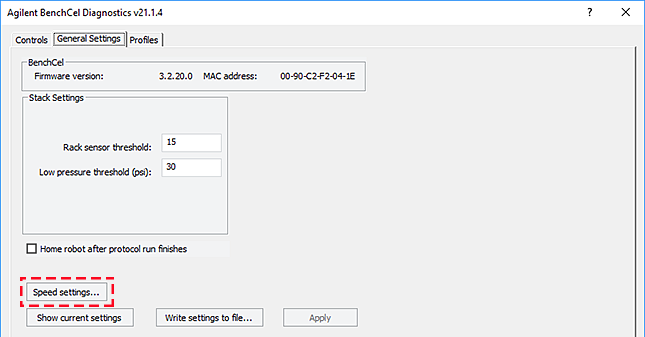
To set the Slow, Medium, and Fast speeds as a percentage of the factory-set maximum speed:
1 On the General Settings tab, click Speed settings.
 |
2 In the Speed Settings dialog box, type the percentage of the factory-set maximum speed for the axis speed setting.
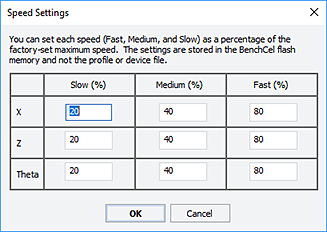 |
Note: The factory speed settings for all three axes are Slow 20%, Medium 40%, Fast 80%.
Note: The speed settings apply to the speeds you select in BenchCel Diagnostics, Labware Editor, and the VWorks Options dialog box.
3 Click OK to save the changes.
Moving plates between teachpoints
You can move a microplate between teachpoints when you are verifying a teachpoint or to determine whether to home the motors.
To move plates between teachpoints:
1 Manually place a microplate at one of the two teachpoints.
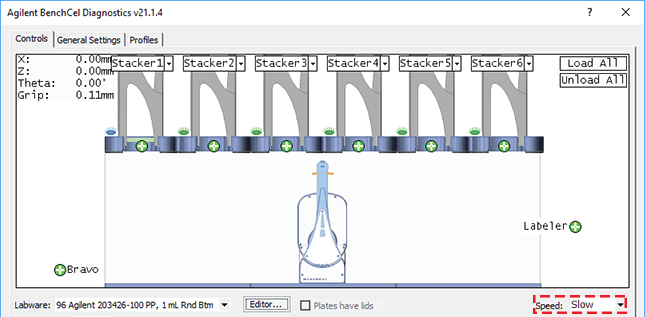
2 In BenchCel Diagnostics, click the Controls tab, and then select the Slow speed.
 |
3 In the graphical display area, click the plus sign ( ) at either of the following:
) at either of the following:
) at either of the following:• The teachpoint you want to move to
• Two teachpoints between which you want to move a plate
The selected teachpoints should be highlighted in red circles ( ).
).
).4 Rest the pointer on a selected teachpoint. In the command menu that appears, select one of the following:
Command | Description |
|---|---|
Move to <teachpoint> | Moves the robot from its current position to the selected teachpoint. The robot stays at the teachpoint. |
Pick from <teachpoint> | Picks up the microplate from the selected teachpoint and moves the plate to the ready-for-upstack position under the stacker head. |
Place at <teachpoint> | Moves the robot from its current position and places the microplate at the selected teachpoint. After placing the microplate, the robot backs away from the teachpoint into the safe zone. |
Transfer to <teachpoint> | Moves a microplate from the currently selected teachpoint to the other selected teachpoint. To transfer a microplate from a stack, you must first click Load Stacker. During the transfer, the robot downloads the plate, places it at the other selected teachpoint, and then backs into the safe zone. If the robot is transferring a plate from one teachpoint to another, the robot picks up the microplate from the currently selected teachpoint, places the microplate at the other selected teachpoint, and then backs into the safe zone. |
Delid from <teachpoint> | Lidded labware only. Removes the lid from the labware that is at the selected teachpoint. |
Relid to <teachpoint> | Lidded labware only. Replaces the lid on the labware that is at the selected teachpoint. |
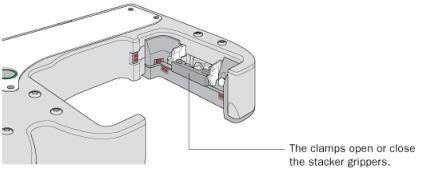
Opening and closing clamps
The clamps in the stacker head close and open the grippers at the bottom of the labware rack to hold and release the first plate in position for the robot grippers. Compressed air is used to move the clamps.
The clamps close and open the stacker grippers automatically during the loading, unloading, downstacking, and stacking procedures. When diagnosing problems or after an aborted run, you can use the commands in BenchCel Diagnostics to open or close the clamps (stacker grippers). For example, you might want to open the clamps (stacker grippers) to remove a microplate.
 |
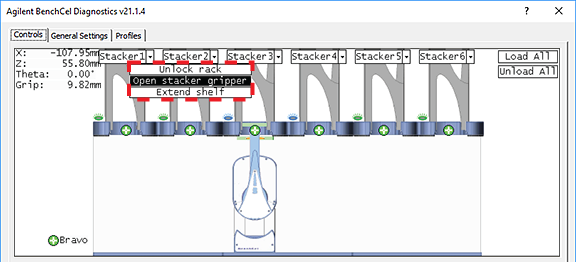
To open or close the clamps (stacker grippers):
1 In BenchCel Diagnostics, click the Controls tab.
2 In the graphical display area at the top of the rack, click Stacker, and then choose Open stacker grippers or Close stacker grippers. A click sounds as the clamps (stacker grippers) open or close.
 |
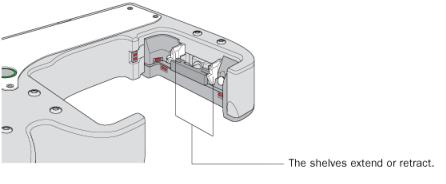
Extending and retracting shelves
The shelves in the stacker head are used to hold the stack of labware temporarily during the downstacking and upstacking processes. Resting the microplates on the shelves levels the microplates, allowing the robot grippers to accurately hold the microplate at the specified offset position. Compressed air is used to move the shelves.
The shelves extend and retract automatically during the downstacking and upstacking processes. When diagnosing problems or after an aborted run, you can use the commands in BenchCel Diagnostics to extend or retract the shelves.
 |
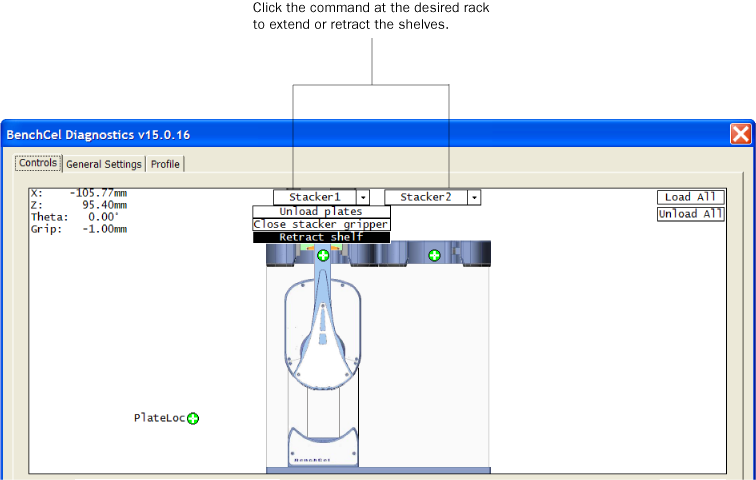
To extend or retract the shelves:
1 In BenchCel Diagnostics, click the Controls tab.
2 In the graphical display area at the top of the desired stacker:
• Click Stacker > Extend Shelves to extend the shelves.
• Click Stacker > Retract Shelves to retract the shelves.
A click sounds as the shelves extend or retract.
 |
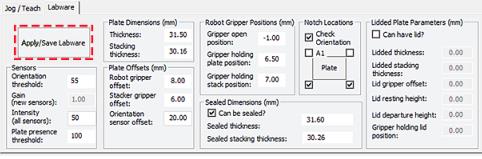
Changing labware parameters
When testing new or troubleshooting existing labware definitions, you can use BenchCel Diagnostics to make changes to some of the labware parameters without opening the Labware Editor. For example, you can change the stacking thickness, gripper offsets, notch specification, and lid specifications.
Note: Changes you make to the labware parameters in BenchCel Diagnostics are also updated in the Labware Editor.
Before you start
Calculate the values for the labware sensor thresholds. See the procedure in Setting sensor thresholds.
Procedure
To change the labware parameters:
1 On the Controls page, select the labware definition from the Labware list.
2 Click the Labware tab and make your changes to the labware parameters.
3 If you want to check for notches, under Notch Locations, select Check Orientation, and then select one or more of the microplate corners to indicate the notch location.
4 If you plan to process lidded microplates:
a Under Lidded Plate Parameters (mm), select the Can have lid? check box.
b Under the graphical display area on the Controls page, select the Plates have lids check box.
c In the Lidded Plate Parameters (mm) area, type the following values after you verify the measurements. For details on measuring these parameters, see BenchCel Diagnostics - Labware tab.
• Lidded thickness
• Lidded stacking thickness
• Lid gripper offset
• Lid resting height
• Lid departure height
• Gripper holding lid position
5 To make changes to other labware parameters, click Editor. You can make changes in the Labware Editor.
See the VWorks Automation Control Setup Guide for instructions on using the Labware Editor.
6 Click Apply/Save Labware.
VWorks Plus only. If an audit trail is being logged, the Audit Comment dialog box opens. Select or type the audit comment, and then click OK.
 |
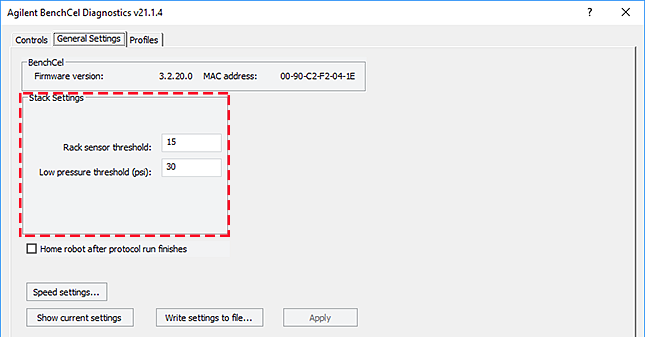
Changing the general settings
To change general settings:
1 In BenchCel Diagnostics, click the General Settings tab.
2 In the Stack Settings area, type a new value for the parameter you want to change.
 |
Setting | Comment |
|---|---|
Rack sensor threshold | The value above which a rack is considered present at the rack-presence sensor. |
Low pressure threshold (psi) | The value at or below which the system will display a low-pressure warning. The default factory setting is 30 psi. Note: If this value is too low, the device could drop microplates without generating a low air-pressure warning. |
3 Select Home robot after protocol run finishes if you want the robot to return to its home position after the protocol run is finished.
4 Optional. To change the speed, click Speed Settings. See Changing the robot speed for instructions.
5 Click OK to apply and save the new setting values.
6 VWorks Plus only. If an audit trail is being logged, the Audit Comment dialog box opens. Select or type the audit comment, and then click OK.
Related information
For more information about… | See… |
|---|---|
How to open BenchCel Diagnostics | |
How to report a problem | |
Defining labware | VWorks Automation Control Setup Guide |
Teachpoints | |
Installing and removing labware racks |