Setting Bravo properties
When to set Bravo properties
If you are operating a Bravo Platform that has a robot gripper, use this procedure to ensure that the parameter values are set correctly.
Note: The Bravo gripper is an optional feature.
Before you start
• You must be logged in as an administrator or technician to perform this procedure.
• You must first create an entry for the labware.
• VWorks Plus only. Each labware entry is a record of interest that transitions through development states. A VWorks technician or administrator can edit labware entries that are In Development or In Validation. The parameter settings in the Labware Entries tab are unavailable if the labware entry is Released.
Procedure
To set Bravo properties:
1 Open the Labware Editor.
2 In the Labware Entries tabs, click the Bravo sub-tab.
3 Under Gripper Offset and Positions, type the Robot gripper offset. This is the height (mm) of the gripper above any teachpoint when the Bravo gripper is picking up or placing a microplate of this type.
 |
4 Enter the Robot lid gripper offset. This is the height (mm) above the lid resting height at which to grip the lid. (Shown as b below.)
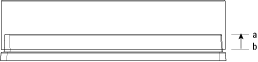 |
5 Select Ignore plate sensor during pick and place to tell the robot gripper to ignore the feedback from the microplate sensor during a pick and place for this labware. Typically, this is selected when troubleshooting.
Related information
For information about... | See... |
|---|---|
Opening the Labware Editor | |
Workflow for adding labware to the Labware Editor | |
Using labware classes |