BenchCel Diagnostics - Jog/Teach tab
You use the Jog/Teach tab for the following procedures:
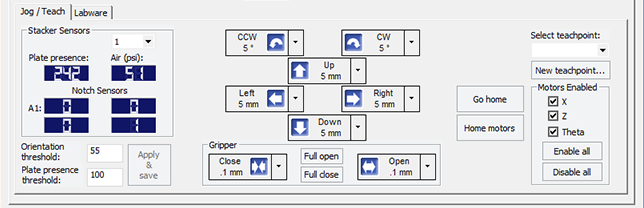 |
Stacker Sensors area
Setting, status, or command | Description |
|---|---|
Stacker list | The stacker identifier, numbered from left to right. For example, to select the left-most stacker, select 1. |
Plate presence | The plate-presence sensor reading. |
Air (psi) | The internal air pressure measurement, in psi. |
Notch Sensors A1 | The plate-orientation sensor reading for the A1 corner of the microplate. |
Top-right | The plate-orientation sensor reading for the top-right corner of the microplate. |
Bottom-left | The plate-orientation sensor reading for the bottom-left corner of the microplate. |
Bottom-right | The plate-orientation sensor reading for the bottom-right corner of the microplate. |
Orientation threshold | The value that determines the presence of a microplate notch. A notch is present if the value is below this value. If the sensor value is above this threshold, no notch is reported. The default value is 100. Note: The setting is also available in the Labware tab. |
Plate presence threshold | The value that determines if a microplate is detected. Any value equal to or greater than the threshold means a microplate is present. A lesser value means there is no microplate. Note: The setting is also available in the Labware tab. |
Apply & save | The command that saves the updated settings in the Jog/Teach tab. |
Robot movement area
Command | Description |
|---|---|
 CCW CCW | Jogs the robot arm counterclockwise from the current position by the specified theta-axis increment. |
 CW CW | Jogs the robot arm clockwise from the current position by the specified theta-axis increment. |
 Left Left | Jogs the robot head left from the current position by the specified x-axis increment. |
 Up Up | Jogs the robot head up from the current position by the specified z-axis increment. |
 Right Right | Jogs the robot head right from the current position by the specified x-axis increment. |
 Down Down | Jogs the robot head down from the current position by the specified z-axis increment. |
Gripper  Open Open | Opens the robot grippers by the specified grip increment. |
 Close Close | Closes the robot grippers by the specified grip increment. |
Full open | Opens the robot grippers to the robot Gripper open position set in the Labware tab. |
Full close | Closes the robot grippers to the robot Gripper holding plate position set in the Labware tab. |
Go Home | Moves the robot head to the home position, which is at the center of the BenchCel Microplate Handler, and the robot arms are perpendicular to the x‑axis. You send the robot to the home position if you want the robot out of the way in a safe position. |
Home Motors | Sends the robot to the factory-defined home position for each axis of motion. The homing process recalibrates the robot position along each axis. Home the robot if you notice that the robot is not accurately picking up or placing plates. You might also want to home the robot after recovering from an emergency stop. If a labware definition is selected when you click Home motors, the robot grippers return to the Gripper open position defined for the selected labware. |
Teachpoint area
Selection or command | Description |
|---|---|
Select teachpoint | Allows you to select from the list of available teachpoint files. |
New teachpoint | Opens the Teachpoint Details dialog box. See Teachpoint Details dialog box. |
Motors Enabled area
Command | Description |
|---|---|
X | Enables or disables the x‑axis motor. Select the check box to enable the motor. Clear the check box to disable the motor. |
Z | Enables or disables the z‑axis motor. Select the check box to enable the motor. Clear the check box to disable the motor. |
Theta | Enables or disables the theta-axis motor. Select the check box to enable the motor. Clear the check box to disable the motor. |
Enable all | Enables all of the robot motors simultaneously. |
Disable all | Disables all of the robot motors simultaneously. |