Setting the home position
About the home position
The Labware MiniHub home position is the position at which the automation robot accesses any slot in cassette 1. Cassette 1 is identified by the number 1 on the cassette cap.
 |
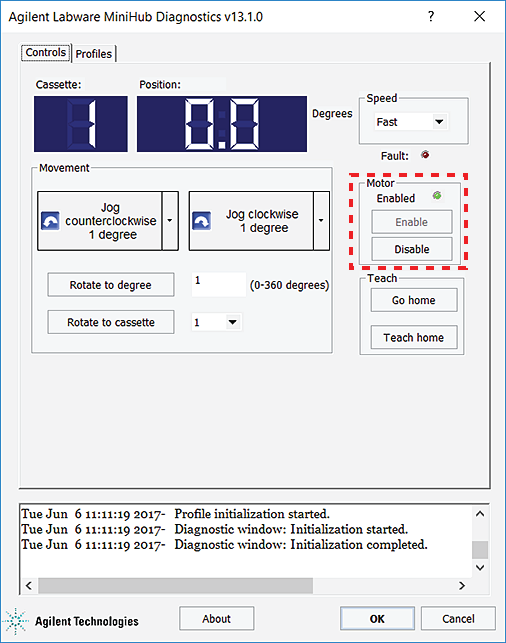
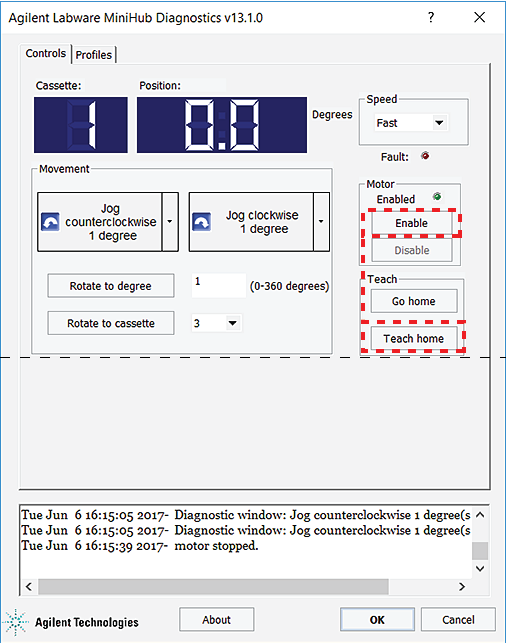
When the MiniHub is in the home position, the Position value in the Controls tab is set at 0.0.
 |
Before you start
Make sure you do the following:
• BenchCel Configuration. Load the labware you want to use in one of the stackers, and then downstack a labware. The BenchCel robot should be holding the labware.
• Integration Configuration. Use the robot (BenchBot or DDR) to pick up the teaching jig or microplate from a platepad. The robot should be holding the teaching jig or microplate.
Procedure
To set the Labware MiniHub home position:
1 Disable the robot (BenchCel, BenchBot Robot, or DDR) so that you can manually move the robot arm.
For instructions, see the corresponding robot user guide, for example, the BenchCel Microplate Handler User Guide.
Note: For the DDR and BenchBot, the robot must to be in Teach mode.
2 In Labware MiniHub Diagnostics, click the Controls tab, and then click Disable in the Motor area. You should be able to manually rotate the Labware MiniHub.
 |
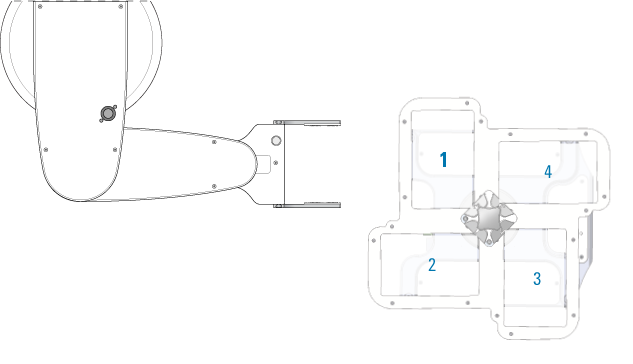
3 Manually rotate the MiniHub so that cassette 1 faces the robot. This is the approximate home position.
In the following figures, notice that cassette 1 is facing the robot.
Figure BenchCel Microplate Handler integrated with MiniHub (top view)
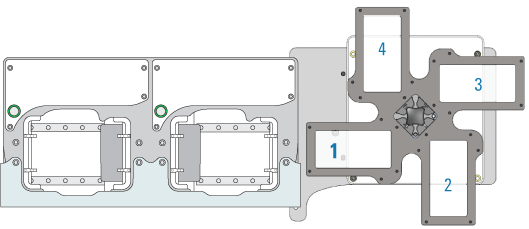 |
Figure Direct Drive Robot integrated with the MiniHub (top view)
 |
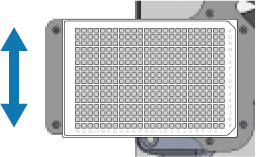
4 Move the robot so that the microplate held in the gripper sits in MiniHub shelf 1, the bottom-most shelf, in cassette 1.
Note: You can place the microplate in any cassette-1 shelf. However, because you will need to set a robot teachpoint at each shelf later, it is convenient to start with shelf 1 in this procedure.
5 Check the position of the microplate. You might have to rotate the Labware MiniHub slightly or move the robot arm until the microplate is seated correctly in the slot.
If the microplate is seated at a slight angle to the shelf, rotate the Labware MiniHub slightly to adjust the microplate position.
 |
BenchCel Configuration only. If the microplate is sitting too far forward or backward, and adjusting the BenchCel robot and MiniHub manually do not solve the problem, unlock the MiniHub integration plate. Move the MiniHub-integration plate assembly forward or backward until the microplate is seated correctly in the slot.
 |
6 In the Controls tab:
a Click Enable under Motor to re-enable the motor.
b Click Teach Home. Notice that the Position value is set at 0.0.
 |
7 In the Profiles tab, click Update this profile to save the change.
 |
8 Leave the labware and robot in their current position and proceed to set the robot teachpoints.
Related information
For information about... | See... |
|---|---|
Creating profiles | |
Editing and managing profiles | |
Setting robot teachpoints | |
Configuring the MiniHub |