Configuring external robot access
About external robot access options
For a Bravo Platform that is integrated in a system with other plate-handling robots, you can configure one of the following features in the Bravo profile:
• Permit only one robot to operate on the Bravo deck at any given time. While an external robot accesses the Bravo deck, the Bravo head moves to a specified safe location and Bravo operations pause for the duration.
• Allow the Bravo robot and one or more external robots to operate on the Bravo deck concurrently. For each external robot, you must specify the deck locations that are not available (blocked) to the Bravo robot during concurrent operations.
VWorks Plus. The software logs audit trails for device profiles (.xml file type), which are records of interest.
Workflow
Perform the following steps to configure an external robot’s access on the Bravo deck. This workflow assumes that you have already verified the Bravo Platform teachpoints.
Step | For this task... | See... |
|---|---|---|
1 | Carefully plan which deck locations the external robots can access and where the Bravo head can be during the external robots’ access. | |
2 | Ensure that the device file specifies that the Bravo deck locations are accessible by the external robots. | |
3 | In the Bravo profile, configure the external robot access, and then update and re-initialize the profile. | |
4 | Set each external robot’s teachpoints at the appropriate Bravo deck locations. | Relevant user documentation, such as the BenchCel Microplate Handler User Guide. |
5 | Perform a dry run at slow speed to verify that there are no potential hardware collisions. Ensure that the emergency-stop pendants are within easy reach in case you need to abort a robot movement. |
Planning the robot access locations
Careful planning of the deck locations that the Bravo robot and any external robots can access will optimize your throughput and prevent hardware collisions.
Physical factors to consider
Make sure you consider the following factors when you plan the deck locations that an external robot may access or when selecting a safe location for the Bravo head.
Physical factors | Description |
|---|---|
External robot direction of approach and Bravo x‑ and y‑axes of motion | The Bravo tie bar moves along the x-axis across the front of the Bravo deck whenever the head moves to a deck location. If the Bravo head is at a location in the back row, the tie bar will block another robot’s approach from the front to the other deck locations in that column. For example, if the Bravo head is at location 2, the tie bar blocks a front approach to locations 5 and 8. Figure Bravo head mount and tie bar motion (front view) and (side view) 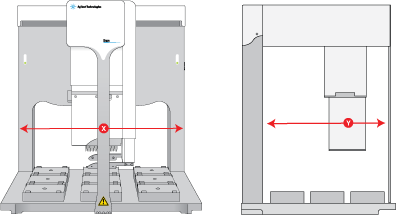 |
External robot physical reach | Some robots can reach any Bravo deck location, while other robots can access a subset of deck locations. For example, the BenchCel robot approaches the Bravo Platform from the left or right side only and can access only the left-most and right-most deck locations. Figure BenchCel robot reach on Bravo deck (top view) 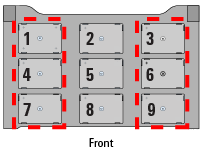 |
External robot orientation for gripping labware: landscape or portrait | Landscape and portrait gripper orientations require different space allocations on the Bravo deck. Some robots can grip using either orientation. • Landscape  • Portrait  |
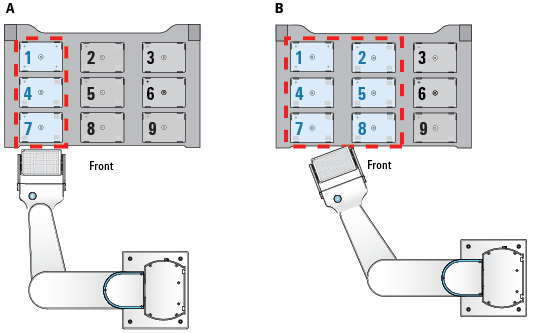
External robot’s approach path | The approach path of the external robot can affect which Bravo deck locations must be blocked for the Bravo head during the external robot’s access. For example, the following figure shows two variations of an external robot’s approach path to deck location 7. The blue locations are where the Bravo head could potentially continue operations concurrently while the external robot is accessing the deck: • Example A. The external robot is accessing location 7. However, locations 1 and 4 are also blocked to prevent the tie bar from being in the path of the external robot when it accesses location 7. The Bravo head can access the remaining deck locations (blue) without risking a collision with the external robot during its approach to location 7. • Example B. In addition to locations 1, 4, and 7, the Bravo head is blocked from accessing location 8. The Bravo head cannot access location 8 without risking a potential collision with the external robot during its approach to location 7. |
 | |
Software scheduling conflicts
The software resolves conflicts, where both the Bravo robot and external robot are scheduled to approach a blocked location, as follows:
• If the Bravo robot is at a blocked location when an external robot is scheduled to approach, the Bravo robot will complete the task in progress before moving to a different location. After the Bravo robot completes the move from the blocked location, the external robot can approach the target location.
• If the Bravo robot and the external robot are both scheduled to approach a blocked location, the software gives priority to the request that it receives first.
For example, the Bravo robot would get priority, regardless of whether the location is configured as blocked, if the software receives the Bravo robot's request for access before receiving the request from the external robot.
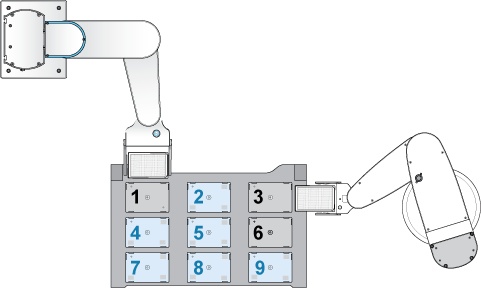
Example scenario 1: Two BenchCel robots and the Bravo robot operating concurrently
In this example, three robots can move concurrently at the Bravo deck:
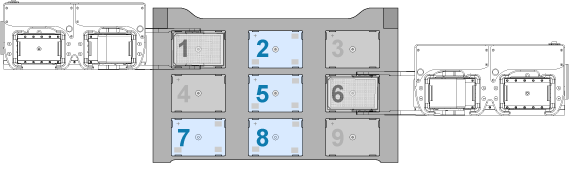
• BenchCel robot 1. Downstacks labware to deck location 1. The Bravo head is also blocked from location 4 during the external robot access to prevent a potential collision with the opened BenchCel gripper arms.
• BenchCel robot 2. Upstacks labware from deck location 6. The Bravo head is also blocked from locations 3 and 9 during the external robot access to prevent a potential collision with the opened BenchCel gripper arms.
• Bravo robot. Performs operations at locations 2, 5, 7, and 8 while the two BenchCel robots simultaneously access the other deck locations. For example, the Bravo robot could move a tip box from location 7 to 8, perform a Tips On task at location 8, and then aspirate and dispense at the labware on deck locations 2 and 5.
The following figure shows the deck location designations for the two BenchCel robots and the Bravo robot.
Figure Deck locations for Bravo robot (blue) and BenchCel robot (gray) operations
 |
Example scenario 2: The Bravo robot, BenchBot Robot, and Direct Drive Robot operating concurrently
In this example, three robots can move concurrently at the Bravo deck:
• BenchBot Robot with a landscape grip. Approaches location 1 from the rear opening in the Bravo backplate. To be conservative, location 2 is also reserved for the BenchBot Robot and blocked for access by the Bravo robot.
However, if you are certain that the external robot’s approach path would not cross within the area that the Bravo head requires to access location 2, location 2 could be unblocked to optimize usage.
• Direct Drive Robot with a portrait grip. Approaches location 3 at the right side of the Bravo deck. To be conservative, location 6 is also reserved for this robot and blocked for access by the Bravo robot.
• Bravo robot. Continues operations at deck locations 4, 5, 7, 8, and 9.
The following figure shows the deck location designations for each of the three robots.
Figure Deck locations for the Bravo robot (blue), BenchBot robot (gray), and Direct Drive Robot (gray) operations
 |
Preventing concurrent operation during external robot access
You can use the safe location feature to prevent Bravo operations while an external robot is accessing the Bravo deck. The safe location feature does the following:
• Allows one robot to access the Bravo deck at any given time. For example, if the Bravo robot is performing a liquid-handling task, the external robot will wait for the Bravo robot to finish before approaching the deck. If the external robot is placing or removing labware from a deck location, the Bravo robot will move to its safe location wait for the external robot to finish.
• Enables the Bravo robot to move to a specified deck location (safe location) whenever the external robot approaches the deck to perform a task. For example, if you specified deck location 1 as the safe location, the Bravo robot will always move to deck location 1 whenever the external robot approaches.
For guidelines on how to select the safe location, see Planning the robot access locations.
To prevent concurrent operation during external robot access:
1 In Bravo Diagnostics, click the Profiles tab and select the profile that you want to update.
2 Click the External Robots tab, and ensure that the select Prevent Bravo operation during external robot access check box is selected.
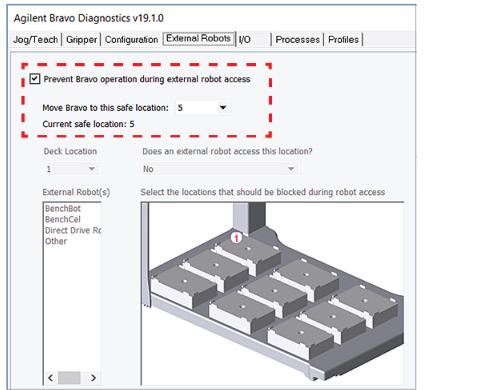 |
3 In the Move Bravo to this safe location box, select the deck location number where the Bravo head should move for the duration while the external robot is accessing the Bravo deck.
Note: Location 5 is the default safe location.
4 In the Profiles tab, click Update this profile.
VWorks Plus only. If an audit trail is being logged, the Audit Comment dialog box opens. Select or type the audit comment, and then click OK.
Allowing concurrent operations during external robot access
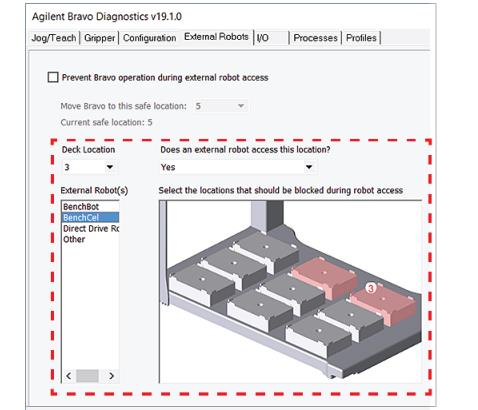
To allow concurrent operation during external robot access:
1 In Bravo Diagnostics, click the Profiles tab and select the profile that you want to update.
2 Click the External Robots tab.
3 Clear the Prevent Bravo operation during external robot access check box.
4 To configure a location for one or more robots, do the following:
a In the Deck location box, select the location number.
b In the Does an external robot access this location box, select Yes.
c In the External robot list, select the robot or robots that may access this location.
In the deck image, highlights appear at additional deck locations to be blocked. The Bravo robot cannot access blocked locations while the external robot is accessing the target location. The software proposes the most conservative layout for avoiding potential collisions.
 |
Note: The software makes assumptions about the approach direction and robot gripper orientation when proposing blocked locations. For example, the software assumes a portrait orientation and an approach from the side of the deck for external robot access at deck locations 1, 3, 4, and 6. For locations 7 and 9, the software proposes blocked locations for either a side approach and portrait orientation or a front approach and landscape orientation.
d Verify that the proposed blocked locations in the deck image are appropriate. To block or to clear a blocked location, click the location in the deck image.
If you are certain that the external robot’s approach path will not intersect with the Bravo head at the given deck location, you can unblock proposed locations to optimize the layout.
5 Repeat step 4 for other deck locations that may be accessed by external robots.
6 In the Profiles tab, click Update this profile.
VWorks Plus only. If an audit trail is being logged, the Audit Comment dialog box opens. Select or type the audit comment, and then click OK.
Related information
For information about... | See... |
|---|---|
Profiles | |
Editing teachpoints | |
Opening diagnostics |