Creating or adding a Bravo device
About this topic
Read this topic if you are an administrator responsible for managing Agilent devices that are controlled by the VWorks software. This topic describes how to add and delete new Bravo devices in the VWorks software.
The VWorks software uses the information in a device file to communicate with and operate the Bravo device.
• If your computer was configured by Agilent Technologies. The correct device configuration is already set up for communication with the Bravo Platform. You are not required to create a new Bravo device in the software unless you want to reference different profiles. To establish communication, you must initialize the device.
• If you configured your own computer. You must add a device in the VWorks software for each Bravo Platform in the system.
Devices and device files defined
A device is an item in your lab automation system that has an entry in a VWorks software device file. A device can be a robot, an instrument, or a location in a lab automation system that can hold a piece of labware.
The device file (*.dev) stores information for all the devices in an integrated system, including:
• Type of device (for example, Bravo device)
• Device configuration information (for example, approach height, allowed or prohibited labware, and so on)
• Profile to use
VWorks Plus. The software logs audit trails for device files, which are records of interest.
Creating a device file
If you are setting up the Bravo Platform for the first time, you will create a device file. You add the Bravo device and the external devices to the device file.
To create a device file:
1 In the VWorks window, select File > New > Device. A Device File tab appears.
 |
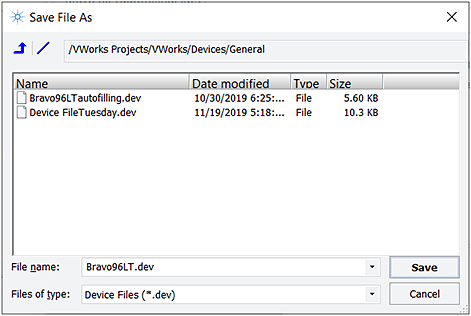
2 Select File > Save to save the device file.
3 In the Save File As dialog box, select the storage location, type the file name, and then click Save.
 |
4 VWorks Plus only. If an audit trail is being logged for records in the development state, the Audit Comment dialog box opens. Select or type the audit comment, and then click OK.
Adding the Bravo device to a device file
Before you begin:
• Ensure that any devices are physically networked to the computer.
• Turn on the devices.
To add devices to a device file:
1 In the VWorks window, verify that the correct device file is open.
To open a device file, choose File > Open > Device. In the Open File dialog box, locate and select your device file (*.dev), and then click Open.
2 In the Available Devices area, double-click the Agilent Bravo icon. Or, drag the icon to the Device File tab.
Note: To show or hide the list of available devices, choose View > Available Devices.
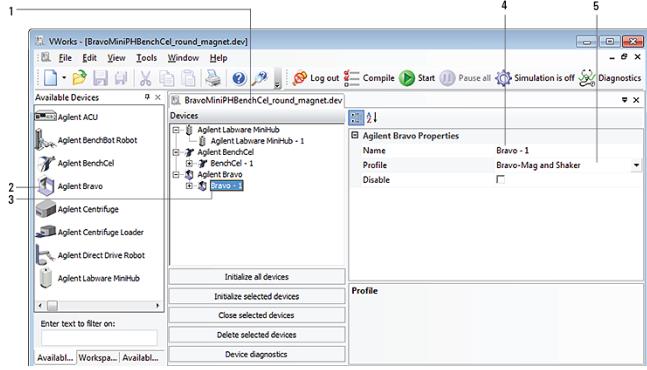 |
3 In the Device File tab, select the Agilent Bravo‑n icon.
4 Under Agilent Bravo Properties, type a Name for the device.
Note: By default, the software assigns Bravo‑n, and increments the number for each Bravo device that you add.
To identify the specific Bravo, you can include the device serial number in the device name.
5 In the Profile list, select a profile for the device.
If the Profile list is empty, open Bravo Diagnostics and create a profile. Then return to the Profile list under Bravo Properties and select the new profile.
6 On the Device File tab, expand the Bravo device icon to show the list of deck locations, and then click the location 1 icon. The corresponding location properties appear.
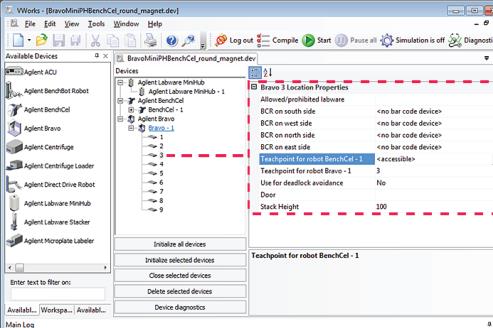 |
Set the desired values for the following properties. Use the default values for the remaining properties.
Property | Description |
|---|---|
Allowed/prohibited labware | Optional. Click  if you want to specify labware restrictions for this location. The Allowed/prohibited labware dialog box appears. For details on the labware classes, see Creating and assigning labware classes. if you want to specify labware restrictions for this location. The Allowed/prohibited labware dialog box appears. For details on the labware classes, see Creating and assigning labware classes.Note: If the button is not visible, click the empty field. |
BCR on side | If a barcode reader is set up at this location, you specify the side. |
Teachpoint for robot <robot name> | If the device is integrated with an external robot, specify whether the robot can access this location. In Bravo Diagnostics, specify whether the Bravo head should move to a safe location or can perform operations at other deck locations concurrently. Carefully plan which locations the external robot can access. |
Teachpoint for robot Agilent Bravo | The Bravo deck location teachpoint identity. For example, the deck location 3 identity is 3. |
Use for deadlock avoidance | Option to permit the location to be used for deadlock avoidance. Select Yes to permit labware to be moved to this location to avoid a deadlock in the system. Select No if you do not want to move random labware to this location to avoid deadlock. |
Stack Height | Type the maximum height (mm) for a labware stack at this location. |
Repeat this step for each deck location.
7 Select File > Save.
If you are creating a new device file, the Save File As dialog box appears so that you can specify a name and location for your device file.
Alternatively, you can select File > Save All to save the device file and the current protocol file at the same time.
VWorks Plus only. If an audit trail is being logged for records in the development state, the Audit Comment dialog box opens. Select or type the audit comment, and then click OK.
Related topics
For more information about… | See… |
|---|---|
Initializing the device | |
Relationship of VWorks components, such as device files, profiles, teachpoints, and labware | VWorks Automation Control User Guide |
Opening Bravo Diagnostics | |
Profiles | |
Planning and configuring external robot access on the Bravo deck | |
Audit trails and records of interest |