Waste Bin
The waste bin is a container that receives waste in the automation workstation. The software views the waste bin as a location (teachpoint) where the robot releases the labware that it has in its gripper. A receptacle for trash is typically positioned under this teachpoint.
If you are configuring a waste location on the Bravo deck, see the Bravo Platform User Guide for instructions.
Setup workflow
Step | For this task... | See... |
|---|---|---|
1 | Install the waste bin. | Agilent Technical Support |
2 | Add the Waste Bin device to the device file. | |
3 | Set and verify the teachpoint for the location. | Applicable device user guide, such as the Bravo Platform User Guide |
Adding the waste bin in the device file
To add a waste bin to the device file:
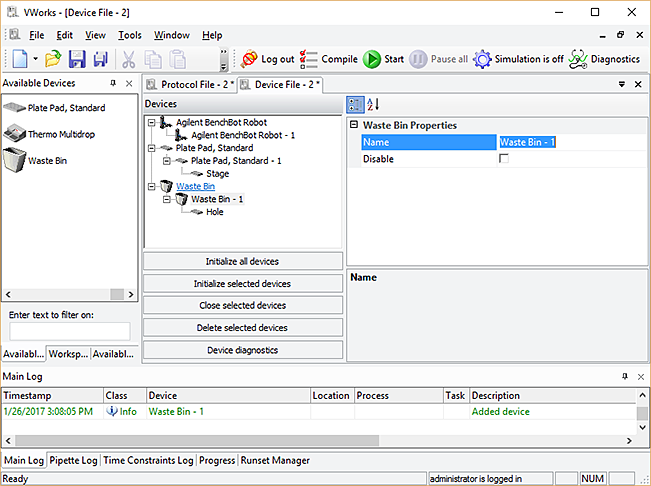
1 In the device file, add the Waste Bin device. See Adding devices for instructions.
2 In the Waste Bin Properties area, type the name of the waste bin.
3 In the Devices area, expand Waste Bin - 1, and then select Hole, the location where the robot will drop waste.
 |
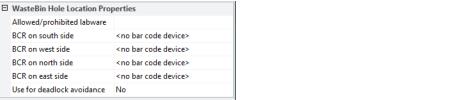
4 In the Waste Bin Hole Location Properties area, type or set the following:
 |
Property | Description |
|---|---|
Allowed/prohibited labware | Permitted labware class for the selected location. Use this field only if you want to limit the labware types. For details on labware classes, see Creating and assigning labware classes. |
BCR on south/west/north/east side | The location of the barcode reader and the desired barcode reader device. Use this field only if a barcode reader is installed on the device. |
Teachpoint for robot | The name of the teachpoint to use for the Hole location. This selection enables the robot to move correctly to and from the Waste Bin during a protocol run. For example, if the robot teachpoint file contains a teachpoint for this Waste Bin, you must select that teachpoint. |
Use for deadlock avoidance | Not applicable. |
Door | Not applicable. |
5 Select File > Save.
6 VWorks Plus only. If an audit trail is being logged, the Audit Comment dialog box opens. Select or type the audit comment, and then click OK.
Related information
For information about... | See... |
|---|---|
Device files | |
Phantom devices | |
Other devices | Device user guide |
Creating a new protocol |